

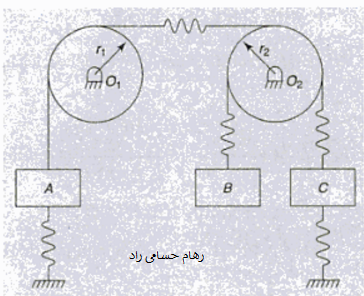
پاسخ داده شده در این مورد خاص 4هستش. دو چرخش قرقره ها و دو حرکت عمودی جرم های B و C. حال چگونه می توان این را تجسم کردش؟ چگونه من به این نتیجه برسم؟ باز هم، آیا ترکیب دیگری ممکنه؟تمام قرقره ها بدون جرم و بدون اصطکاک هستند.فقط با در نظر گرفتن قرقره 1 و جرم A شروع کنم. اگر آنها توسط یک کابل غیر قابل انبساط بدون جرم به یکدیگر متصل شوند، جابجایی جرم A را می توان تابعی از چرخش و شعاع قرقره 1 تعیین کرد. بنابراین ما فقط به 1 درجه آزادی نیاز دارم - چرخش قرقره 1.
اگر یک فنر بین پولی 1 و جرم A اضافه کنیم، دیگر نمیتوانیم مستقیماً موقعیت جرم A را با چرخش قرقره 1 مرتبط کنم. اکنون به 2 درجه آزادی نیاز دارم - چرخش قرقره 1 و جابجایی از جرمA.
حالا قرقره 2 را به مخلوط اضافه کنم. اگر قرقره 1 توسط یک کابل غیر قابل انبساط بدون جرم به پولی 2 متصل میشد میتونم چرخش قرقره 2 را تابعی از چرخش قرقره 1 تعریف کنم. من یک فنر در آنجا دارم، بنابراین باید چرخش را بدونم. از هر دو قرقره با ادامه این منطق و نگاه کردن به جرم B و جرم C -- اگر یکی از آنها با استفاده از یک کابل غیر قابل امتداد بی جرم به پولی 2 وصل میشد میتونم موقعیت آن را تابعی از چرخش قرقره 2 تعریف کنم. با این حال من فنرهایی دارم. به هر دو جرم متصلندپس برای توصیف موقعیت آنها به متغیرهای مستقل نیاز دارم
سپس جرم A و جرم C باید از طریق فنرها به زمین متصل شوند تا کل چیز از هم باز نشه و تمام وزنه ها روی زمین نیفته. (من فکر می کنم اینطوری باشه)
بنابراین من به چهار درجه آزادی نیاز دارم -- چرخش قرقره 1، چرخش قرقره 2، جابجایی جرم B و جابجایی جرم C. جابجایی جرم A تابعی از چرخش قرقره 1 است.من خیلی با شناسایی محدودیت ها به این نوع مشکل برخورد کردم. هر محدودیت مستقل، تعداد درجات آزادی را که برای تعریف کامل سیستم لازم است، محدود میکنه
$DOF = DOF_{system} - \sum \text{Contraints}$در سیستم های سه بعدی هر جرم 6 درجه آزادی دارد:
انتقال به$(x, y, z) \rightarrow 3 \;\text{DOF}$
چرخش$(\theta_{x}, \theta_{y}, \theta_{z}) \rightarrow 3 \;\text{DOF}$
$\therefore DOF_{system} = 6(N_{bodies})$
در سیستم های دو بعدی، هرجرم دارای 3 درجه آزادی است:
انتقال به$(x, y) \rightarrow 2 \;\text{DOF}$
چرخش $(\theta) \rightarrow 1 \;\text{DOF}$
$\therefore DOF_{system} = 15$برای سیستم دو بعدی نشان داده شده (با 5 بدنه)، درجات آزادی را برای سیستم بدون محدودیت محاسبه میکنم
$\therefore DOF_{system} = 15$
اینجا محدودیت های اعمال شده برای هر جرم را تعیین میکنم
قرقره ها توسط (x,y) محدود میشن - هر قرقره 2DOF را حذف میکنه از سیستم توده ها با (x,θ) محدود میشن - هر جرم 2DOF را حذف میکنه از سیستم در نهایت، تشخیص میدم که جرم A و قرقره مجاور آن مستقل نیستند - آنها از نظر حرکتی توسط y=rθ به هم مرتبط هستند.خوب جایی که هر دو حرکت می کنند (طبق معادلات دیفرانسیل سیستم). این محدودیت اضافی برای سیستم باید $DOF = 15 - \sum [2(2 \;\text{DOF})_{pulleys} + 3(2 \;\text{DOF})_{masses} + (1 \;\text{DOF})]$
$= 4 \;\text{DOF}$
