

از این قسمتمی توانید نیروها را با توجه به جهت سرعت یا بردار بالابر بالا ببرید. با انجام این کار به صورت افقیمعادله 1 و به همین ترتیب برای جهت عمودی معادله 3 را دریافت می کنید.
برای سادهتر کردن این کاراز تقریب زاویه کوچک cos(0)=1و sin(0)=0 استفاده میکنیم
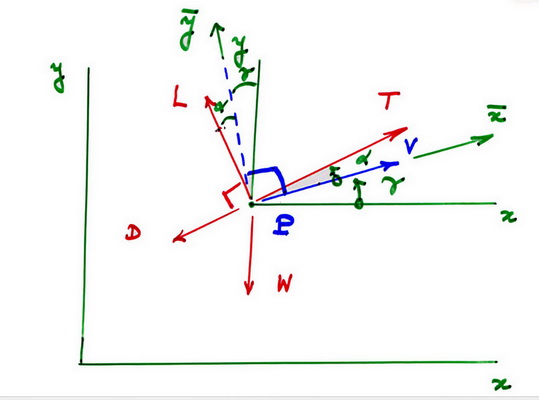
. این به این موارد ساده می شود:$V:0=T-D$و $L:0=mg-L$ (یعنی رانش برابر با کشیدنبلند کردن برابر با وزن)
قسمت 2:
این اساساً معادلات یک نمودار جنبشی نمودار بدن آزاد در بالا استکه در آن ممکن است تغییری در سرعت هوایی ارتفاع وجود داشته باشد. آنچه معادله دوم شما می گوید این است که رانش اضافی (T-DThrust-Drag) می تواند:برای افزایش ارتفاع استفاده شود: $m\times{g}\times\sin(y)$
و/یابرای افزایش سرعت هوا استفاده شود: $m\times{v}$
من سعی میکنم سرم را پیرامون شرایط انرژی که از مشکل ارتعاش سیستمهای گسسته زیر ناشی میشوند بپیچم:
مشکل لرزش بال
اصطلاحات انرژی بالقوه به اندازه کافی ساده به نظر می رسند. پتانسیل ارتجاعی فنر را با سختی k در نظر میگیرم
و سختی پیچشی بال kT:$V = \frac{1}{2}kz^{2} + \frac{1}{2}k_T \theta^{2}$
شرایط انرژی جنبشی بال چیزی است که من در مورد آن مطمئن نیستم. من بال را تقریباً مانند چرخ غلتان تصور می کنم - من حرکت انتقالی کل بال را در جهت z به دلیل فنر (به سمت پایین +ve بودن) و حرکت چرخشی بال در حدود نقطه ای به سمت راست در نظر می دهم. از g یک فاصله دور. قضیه محور موازی باید در اینجا استفاده شود زیرا چرخش حول مرکز ثقل G رخ نمی دهد.
:$T = \frac{1}{2}(I+me)\dot\theta^{2} + \frac{1}{2}m\dot z^{2}$
با این حالشرایط انرژی جنبشی من ناقص به نظر می رسد زیرا معادلات لانگرانژ با آنچه در ماتریس جرم در (a) ارائه شده مطابقت ندارد. چه چیزی را از دست داده ام؟ من فکر میکردم که سرعت مماسی جرم بال منطقی باشداما انرژی دورانی سیستم قبلاً با $\frac{1}{2}(I+me)\dot\theta^{2}$ محاسبه میشود. مدتاصطلاح. چه چیزی را در نظر نگرفته ام؟برای انرژی جنبشیآنالیز را در مرکز قاب جرم انجام دهید. مشاهدات کلیدی این است که ارتفاع عمودی مرکز جرم است
$z_\mathrm{cm} = z - e \sin\theta \; .$
بنابراینبرای نوسانات کوچکسرعت انتقال تقریباً $\dot{z}-e\dot{\theta}$ است
. سپس می توانیم انرژی جنبشی کل را به عنوان مجموع انرژی انتقالی و چرخشی بنویسیم:
$T = \underbrace{\frac{1}{2} I \dot{\theta}^2}_{\text{rotation KE}}$
چگونه بفهمیم که سیستم ارتعاشی به یک درجه آزادی نیاز دارد یا دو؟ و چگونه مختصات مناسب را برای توصیف حرکت انتخاب کنیم؟من می خواهم ترفندی بدانم که به من کمک می کند تا سیستم های نوسانی و نحوه انتخاب مختصات کلی صحیح را که حرکت را توصیف می کند را بفهممهمه چیز را امتحان کردم اما هنوز نمی توانم راه حل را درست پیدا کنممانند این تصویر که مختصات یک مختصات کلی است. آن ${\theta}\; or\;{\varphi}$یا${\theta}\; or\;{\varphi}$
? یا هر دو؟ "دیسک بدون لغزش در حال چرخش است"شرایط غلتش است
هیچ ترفندی وجود ندارد.
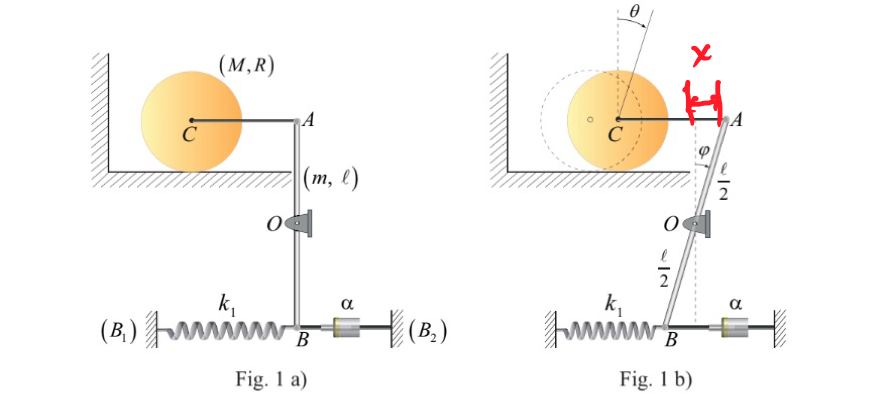
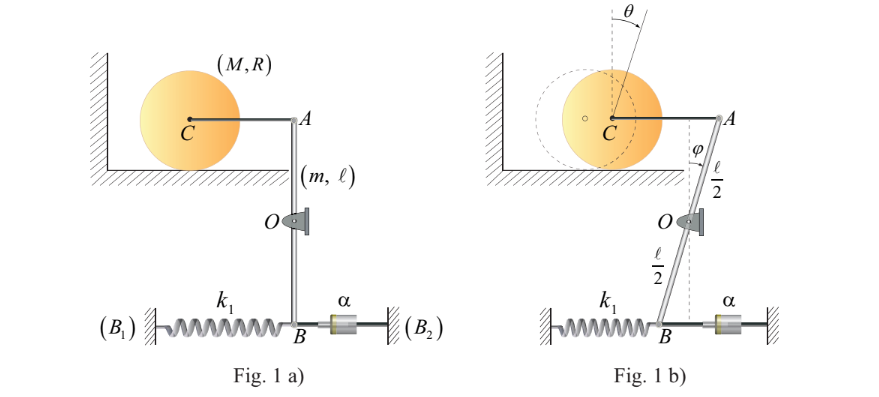
اگر اتصال AC را خارج کنیددیسک می تواند θ را بچرخاند و به سمت x حرکت کنید مستقل از چرخش φ . معادله سینماتیکی از "پیوند" است
$x=\frac l2\sin(\varphi)\approx \frac l2\varphi$
شرایط غلتش است
$x=R\,\theta$شما دو معادله محدودیت برای سه درجه آزادی$~x,\theta,\varphi~$ به دست آوردید
بنابراین شما یک مختصات تعمیم یافته داریدمی توانید x یا θ یا φ را انتخاب کنید
برای این مشکل به طور کلی مختصات تعمیم یافته باید فضای حرکت را بدون تکینگی ریاضی پوشش دهند
با انرژی جنبشی
$T=\frac{I_d}{2}\,\dot\theta^2+\frac{I_r}{2}\,\dot\varphi^2+\frac{M}{2}\dot x^2$
و انرژی پتانسیل$U=-\frac{k}{2}\left(\frac{l\,\varphi}{2}\right)^2-F_d\,\varphi$
جایی که $~I_d~$ اینرسی دیسک$~I_r~$ اینرسی میله و $~F_d~$ است نیروی دمپر است.
با φ مختصات تعمیم یافته معادله حرکت را بدست می آورید
$\ddot\varphi+\frac{R^2\,k\,l^2}{I_d\,l^2+I_r\,4\,R^2}\,\varphi+
\frac{4\,R^2\,k\,l^2}{I_d\,l^2+I_r\,4\,R^2}\,\dot \varphi=0$
