

فرض کنید جسمی در حال حرکت چرخشی و انتقالیه.
من می دانم که ICR جسم به عنوان یک کل، نقطه ای است که چسم در حال چرخش خالص در اطرافشه بنابراین اساساً نقطه ای با سرعت صفر خواهد بود و در جایی قرار می گیره که عمود بر سرعت های هر نقطه تلاقی می کنند. من در مورد مفهوم ICR هر نقطه شنیدم که به عنوان "نقطه ای که نقطه داده شده در اطراف آن می چرخه تعریف شده . آیا میتونو این مفهوم مربوط به ICRهای فردی را توضیح بدم؟ همچنین چگونه می توانم مکان آن را محاسبه کنم و آیا با مرکز انحنای آن نقطه یکی است؟
خب خودک یه کم جواب دادم مرکز لحظهای چرخش نقطهای است که «کل جسم» در اطراف آن حرکت چرخشی خالص انجام میده بنابراین ICR هر نقطه از آن جسم، همان ICR برای کل جسم خواهد بود. برای یافتن این ICR فکر میکنم شما دو نقطه از جسمو را می گیرید و بردار سرعت آنها را پیدا می کنید. هر بردار سرعت را نصف کنید و نقطه تقاطع دوقسمت ها ICR است. بنابراین، برای یافتن ICR، حداقل به دو نقطه در جسم نیاز دارین اما زمانی که آن را پیدا کردین می توانید از "ICR هر نقطه از جسمه صحبت کنید.بچه های هوپایی عزیز
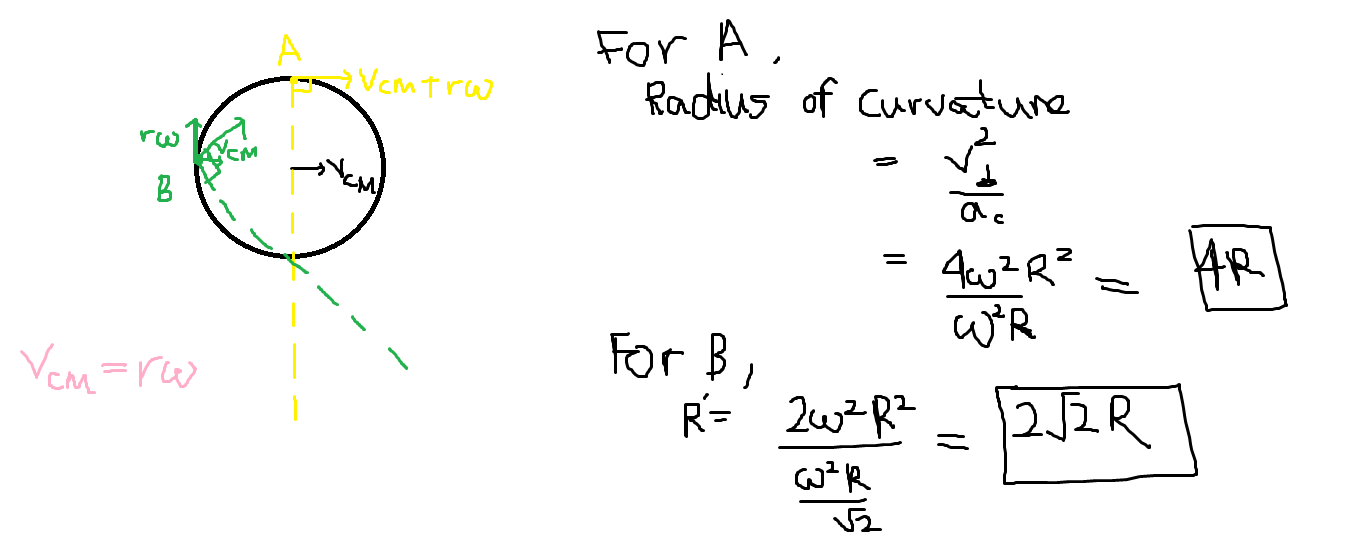
مرکز انحنای نقطه ای است که یک نقطه به صورت دایره ای در اطراف آن حرکت می کند. از آنجایی که ما ICR را با استفاده از بردارهای عمود بر بردارهای سرعت پیدا می کنیم، بردارهای سرعت مماس بر دایره ای به شعاع برابر با فاصله تا ICR هستند. بنابراین، ICR مرکز آنی انحنا است.
در حالت دوبعدی هر نقطه (بیایید آن را A بنامیم) روی بدنه صلب دارای دو جزء سرعت است $(v_x,v_y)$
و خود جسم با ω می چرخه
. محل ICR نسبت به A است$icr = \begin{pmatrix} -\frac{v_y}{\omega} & \frac{v_x}{\omega} \end{pmatrix}$
برای اثبات این موضوع بررسی کنید که $\vec{v}_{icr} = \vec{v}_A + \vec{\omega} \times \vec{r} = 0$
یا با بردارهای مسطح
.$\begin{pmatrix} 0 \\ 0 \\ 0 \end{pmatrix} =
\begin{pmatrix} v_x \\ v_y \\ 0 \end{pmatrix} + \begin{pmatrix}0\\0\\ \omega \end{pmatrix} \times \begin{pmatrix} x \\ y \\ 0 \end{pmatrix}$
$\begin{matrix} x=-\frac{v_y}{\omega} \\ y=\frac{v_x}{\omega} \end{matrix}$
همچنین، از آنجایی که بدن حول ICR در حال چرخش است، نقطه A یک دایره را (به صورت آنی) و بنابراین بله ICR مرکز انحنای تمام نقاط روی جسم صلب است.
در حالت سه بعدی یک جسم صلب حول یک محور میچرخه و ممکنه یک انتقال موازی به آن محور نیز داشته باشه. به نقطه A (روی جسم) با سرعت $\vec{v}_A = (v_x,v_y,v_z)$ داده می شود.
و سرعت دورانی جسمه $\vec{\omega} = (\omega_x,\omega_y,\omega_z)$
اگر ICR توسط ICR داده شود
$\vec{r}_{icr} = \frac{\vec{\omega} \times \vec{v}_A}{\|\vec{\omega}\|^2}$
علاوه بر این، جهت چرخش $\vec{e} = \frac{\vec{\omega}}{\|\vec{\omega}\|}$ است.
و بردار هر حرکت انتقالی موازی است
$\vec{v}_\parallel = \left( \frac{\vec{\omega} \cdot \vec{v}_A}{\|\vec{\omega}\|^2}\right) \vec{\omega}$
ضریب پوسته پوسته شدن در پرانتز بالا گام پیچ نامیده میشه زیرا حرکت چرخش با انتقال موازی یک حرکت پیچ است.
برای اثبات این موضوع، به قانون تبدیل شناخته شده نگاه کنید لطفا $\vec{v}_{icr} = \vec{v}_A + \vec{\omega} \times \vec{r}_{icr} =0$
و هر طرف را با$\vec{\omega}$ ضربدر بزنید خوب
$\begin{array}{rcl}0&=&\vec{\omega}\times\vec{v}_{A}+\vec{\omega}\times\left(\vec{\omega}\times\vec{r}_{icr}\right)\\0&=&\vec{\omega}\times\vec{v}_{A}+\vec{\omega}\left(\vec{\omega}\cdot\vec{r}_{icr}\right)-\vec{r}_{icr}\left(\vec{\omega}\cdot\vec{\omega}\right)\\\vec{r}_{icr}\left(\vec{\omega}\cdot\vec{\omega}\right)&=&\vec{\omega}\times\vec{v}_{A}\\\vec{r}_{icr}&=&\frac{\vec{\omega}\times\vec{v}_{A}}{\vec{\omega}\cdot\vec{\omega}}=\frac{\vec{\omega} \times \vec{v}_A}{\|\vec{\omega}\|^2} \end{array}$در مرحله 3 بالا فرض می شود که $\vec{\omega}\cdot \vec{r}_{icr} = 0$
که با توجه به اینکه$\vec{r}_{icr}$درست است معلوم میشه عمود بر محور چرخشه.
