

تورک مورد نیاز (LbIn) = ناحیه دمپر (Ft2) * ضریب تورک * ضریب تورک
Required Torque (LbIn) = Damper Area (Ft2) * Torque Factor * Torque Factor ( )
Ts = Cs D^2
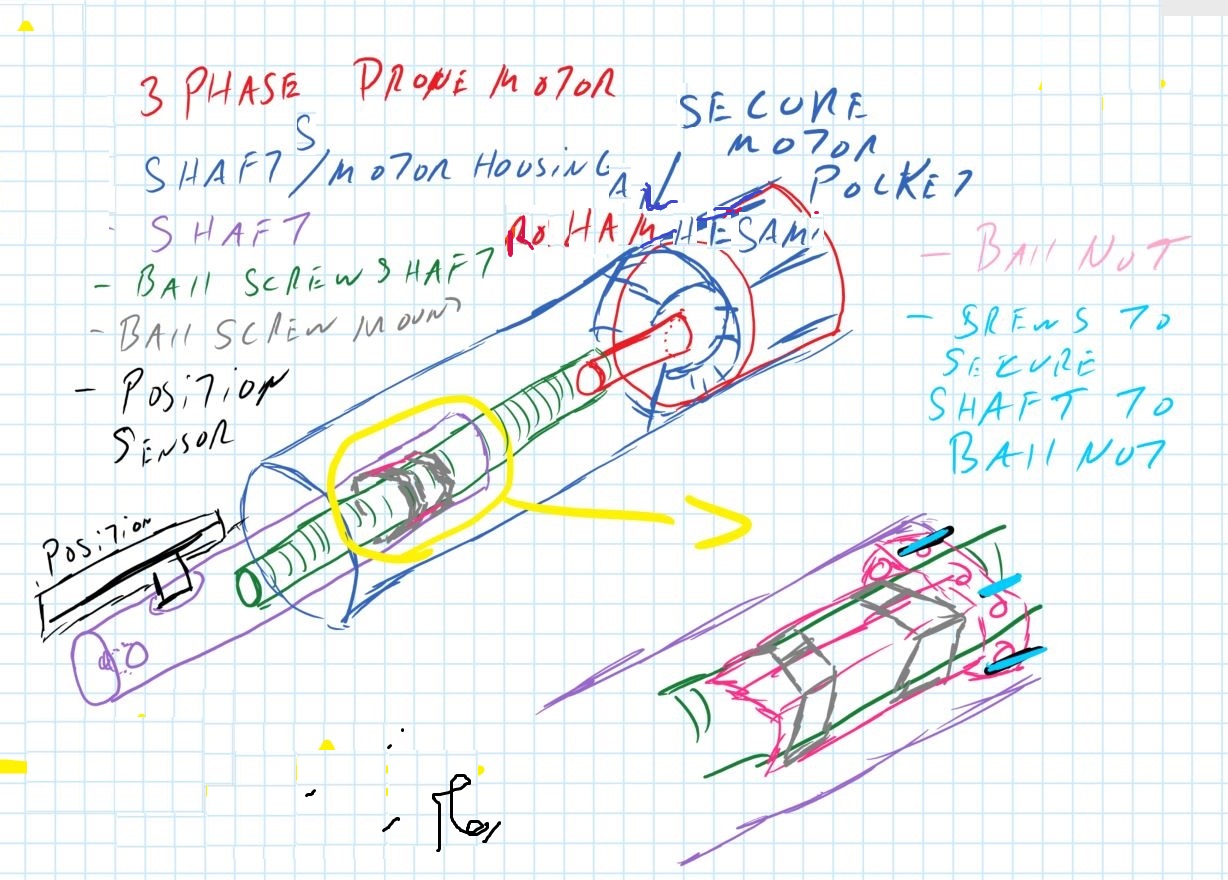
آیا میتونم تورک عملگرهای پره دوار پنوماتیکی را محاسبه کنم
یک درایو پنوماتیک چرخشی استفاده شد.
همچنین شبیه درایو های پنوماتیک پره ای Kinetrol است.
من یک سوال دارم که فرمول تورک چنین درایوی بسته به فشار چیست؟
و آیا محدودیتی در زاویه چرخش چنین درایوی وجود داره؟
من یک سوال دارم که فرمول تورک چنین درایوی بسته به فشار چیست؟
تورک نیرو بر اساس فاصله استبنابراین در این مورد من شک دارم که باید یک انتگرال انجام دهید. بیایید فرض کنیم که پره دارای عرض ثابتw است
حداقل شعاعR1 و حداکثر شعاعr2 . فشار P است (و نیرو در واحد سطح در واحدهای انتخابی شما است).
$T = \int^{R_2}_{R_1}Pwr\ dr = Pw\int^{R_2}_{R_1}r\ dr$
اگر محاسبات ریاضیات من تا اینجا درست باشداین باید درست باشد
$T = \frac {Pw}{2}(R_2^2 - R_1^2)$
و آیا محدودیتی در زاویه چرخش چنین درایوی وجود داره؟
آره. فله زرد به 90 درجه محدود میشه زیرا پره به ریخته گری برخورد می کند. واحد فستو نیز محدودیت های مشابهی خواهد داشت.
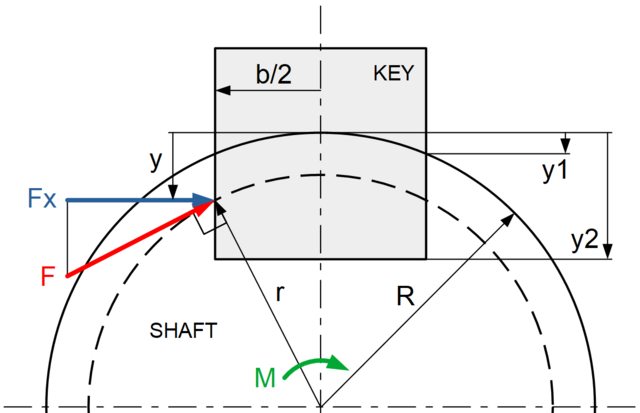
به یاد داشته باشید که نیرو برابر است با فشار بر ناحیه. در مورد خاصم استرس استرس برشی از تورک است که میتواند در فاصله r از مرکز با معادله زیر محاسبه شود (به شرطی که هنوز در ناحیه الاستیک/خطی باشید): $\tau = \frac{M}{I_p} r$ جایی که: $\tau$ استرس برشی است M تورک است
r شعاع است $I_p$ تورک قطبی اینرسی است اگر استرس برشی دارم میتونم نیروی F را که بر یک ناحیه کوچک وارد می کند به صورت زیر محاسبه کنید:
$dF(r) = \tau(r) dA$ این مساحت کوچک را می توان به صورت$dA = L_e\cdot dy$ محاسبه کرد بنابراین
$dF(r) = \tau(r) L_e dy$ سپس باید از$r = \sqrt{(R-y)^2 + (0.5 \cdot b)^2}$ استفاده کنید.
:بنابراین: $dF(y) = \frac{M}{I_p} \sqrt{(R-y)^2 + (0.5 \cdot b)^2} L_e dy$
اکنون من یک معادله نیروی F نسبت به y دارید و میتونم حساب باقی مانده را اعمال کنم
در پایان میتونم تا روی y1 به y2 ادغام بشه
به طور کلی این روش خسته کننده است و دارای مفروضات و خطاهای گرد کردن زیادی است. لیست زیر قطعی نیست:
محاسبه ممان اینرسی قطبی.
تورک قطبی اینرسی را می توان به راحتی برای یک دیسک دایره ای Ip=π2r4 محاسبه کرد
اما با سوراخ کلید همه چیز کمی پیچیده میشه.
تمرکز استرس در گوشه ها
در نزدیکی گوشه سوراخ کلیدتمرکز استرس وجود خواهد داشت که بسته به شعاع خواهد بود و نمی توان آن را به طور دقیق پیش بینی کردبنابراین خطا افزایش می یابد.
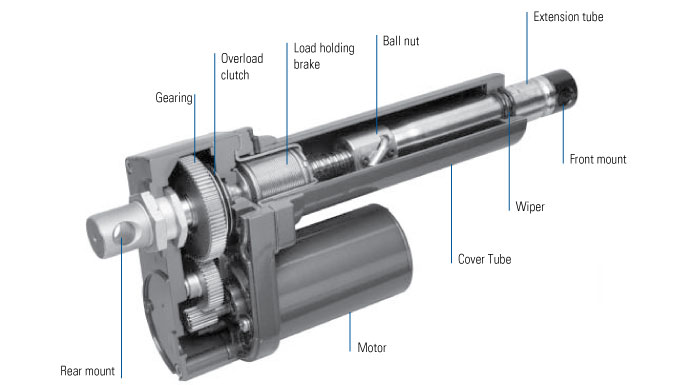
اکچویتور Actuator عملگر تجهیز یک کنترلر است که دستور کنترلی را به اجرا در میاره. در واقع یک دستور برقی را با استفاده از یک منبع تغذیه به یک عمل مکانیکی تبدیل میکنه. این عمل مکانیکی باید ویژگی هایی داشته باشه به اندازه کافی سریع باشهدقیق باشه و حداقل انرژی ممکن را لازم داشته باشه.اکچویتور یا عملگر (Actuator) بخش مهمی از تجهیزات ابزار دقیق به حساب میاد که وظیفه آنان در سیستم کنترلیتبدیل سیگنال کنترلی به سیگنال فیزیکی مورد نیاز فرآینده به عنوان مثال برای تغییر وضعیت یک ولو از حالت باز به بسته و برعکس نیاز به یک حرکت داریم که این حرکت توسط اکچویتور انجام میشه و برای همین هم به اکچویتور ها درایو نیز میگیم درایو های چرخشی ...
درایو های هیدرولیک ...
درایو های پنوماتیکی. ...درایو های چرخشی انرژی پنوماتیکه هیدرولیک یا الکتریکی را به چرخش مکانیکی تبدیل می کنند. درایو های چرخشی پنوماتیک از فشار هوای فشرده برای ایجاد حرکات چرخشی نوسانی استفاده می کنند. دو نوع متداول ترین استراکچر درایو های دوار پنوماتیک شامل استراکچر قفسه و پینیون و پره است.
درایو های الکتریکی ...
درایو های حرارتی و مغناطیسی ...
درایو های مکانیکی ...
درایو های پلیمری فوق سیم پیچ.
Actuator دستورات کنترلی را با کنترل پارامتر اندازه گیری شده اجرا میکند اما اکچویتور چیست؟ در واقع اکچویتور ها عملگران سیستم ما هستند.

تو قسمتهای هواپیما عاشق این هستم البته تو هر وسیله ای هست تو هوافضا بری کنترل ولوها و پمپها خیلی کاربرد داره کنترل بالها کلا معرفی کنم عملگر یا اکچويتور (actuator) در يک لوپ کنترلی به صورت ساده به ابزاری اطلاق میشهکه یکی از صورتهای انرژی را به حرکت از نوع دورانی یا طولی تبديل میکنه و باعث اعمال نيرو میشود. به عبارت دیگر اکچوئيتور تجهيز الکتریکی یا پنوماتیکی یا هیدرولیکی یا دستی است که انرژی را تبديل به حرکت دورانی یا طولی میکنهمن باید بفهمم آیا راهی برای دستیابی به حداقل 60 هرتز حرکت خطی با حداقل 5 میلی متر حرکت وجود داره که قصد دارم دستگاه رااستیبل کنم (نه چرخان) باید تا حد امکان کوچک و سبک باشه(شاید 50 میلی متر طول و 10-15 میلی متر قطر یا اطراف آنها) (کمتر از 500 گرم) بار حدود 50 گرم خواهد بود. سیم پیچ های صوتی وجود دارند میتونم به عنوان مثال از ولوالکتریکی استفاده کنم
درایو حرکت
چند دستورالعمل برای کمک به جستجو:
حداکثر جابجایی: +/- 5 میلی متر. فرکانس: 60 هرتز = 377 راد بر ثانیه.
حالا مقداری ریاضی:
$x = 0.005 \sin{(377 t)} \\
v = (377)(0.005) \cos{(377 t)} \\
a = -(377^2)(0.005) \sin{377 t)} \\$
سپسمقادیر حداکثر در هر جایی است که تابع تریگ خاص برابر با 1 باشدبنابراین:
$x_{\mbox{max}} = 0.005 \mbox{m}\\
v_{\mbox{max}} = 1.9 \mbox{m/s}\\
a_{\mbox{max}} = 710 \mbox{m/s}^2 \approx 72 \mbox{g}\\$
اکنونF=maبنابراین پیک نیرویی که اعمال ممیکنم اینه
$F = ma \\
F = (0.3)(710) \\
F = 213 \mbox{N} \\$
اوج قدرت نیرو ضربدر سرعت است.
$P = (213)(1.9) \\
P = 405 W \\$
طبق دستورالعمل من میخوام (من فرض میکنم) استوانه ای با طول 0.05 متر و قطر 0.01 متر. این به این معنی است که حجم (تقریبا)
$V = Ah \\
V = \pi r^2 h \\
V = \pi (0.005)^2 (0.05) \\
V = 0.00000393 \mbox{m}^3 \\
V = 0.00393 \mbox{liters} \\
V = 3927 \mbox{mm}^3 \\$
اکنونمتونم چگالی توان را بررسی کنم و ببینم که 405 وات اوج قدرت در فضای 0.00393 لیتری یا چگالی توانی در حدود [خطای پردازش ریاضی] یا تقریباً چگالی توان موتور میخوام
فاصله بین درایو خطی و پنل خورشیدی لولایی چقدر است
n در حال طراحی یک پنل خورشیدی هستم که میتونه توسط یک درایو خطی در زیر آن بلند شودتصویر ی که اورد امیدوارم ایده من را به خوبی نشون بده اما هنوز نمیتونم محاسبه کنم که درایو خطی چقدر باید از نقطه لولایی پنل خورشیدی فاصله داشته باشه. میدونمکه نیروی درایو من 1500 نیوتن است بنابراین میخواستم ریاضیات و فرمول ها فاصله بین آن نقاط را محاسبه کنمجایی که میتونم چرخش پانل خورشیدی را حدود 80 درجهحداکثر بیشتر کمتر از 80 و حداقل یک را انجام دهم. 0 درجه در مقایسه با زمیناما همچنان قادر به بلند کردن آن با 1500 نیوتن نیرو است. من میدونم که فرمول نیروی فشار درایو در این مورد F = 2mg/tan (زاویه درایو و کف)-tan (زاویه نقطه لولایی پنل خورشیدی) است.
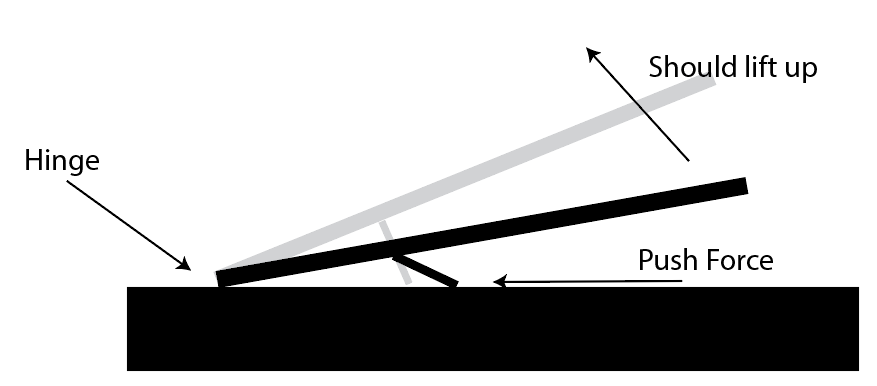
من به یک نمودار بدنه آزاد نیاز دارم که تمام نیروهای وارده را توصیف کنه برام به عنوان تابعی از تیلت پانلθ.من همچنین باید مکان مرکز جرم و همچنین مکان جایی که نیروها در آنجا عمل میکنه را توضیح بدم
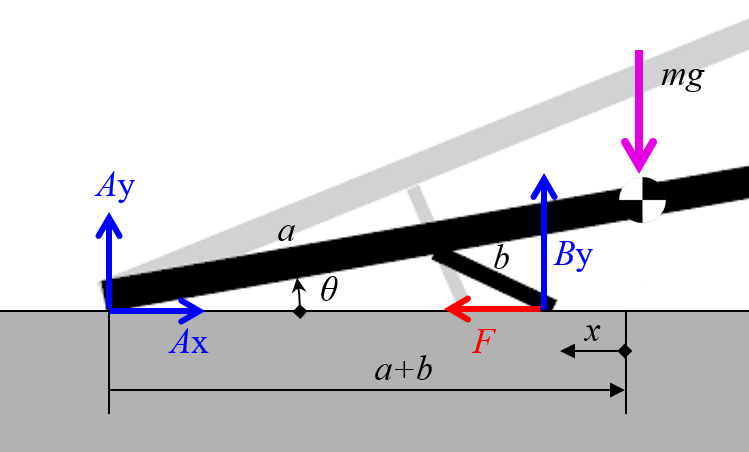
فرض میکنم فواصل a و b را در بالا میدانیدوقتی پانل صاف استواقعی در فاصله a+b از محور قرار میگیره. در این استراکچرم هیچ مقدار نیرویی پانل را بلند نمیکند مگر اینکه نیروی درایو F بالای محور باشه
به طور کلیبا زاویه تیلت θدرایو مقداری را جابجا می کند
$x =a + b - a \cos \theta - \sqrt{b^2-a^2 \sin^2 \theta} $اکنون پایه کوچکی که روی پانل به سمت بالا فشار میاره یک عضو دو نیروی (بدون بارگذاری جانبی) خوب که به معنای بار ترکیبی F و $B_y $در طول آن است. یاپینی که پانل را به سمت بالا هل میده تورک صفر اعمال شده از پایه است.
این زمانی اتفاق میفته که
${ B_{\rm y}}{F} = \tan^{-1} \left( \frac{a}{b} \sin \theta \right)$
اکنون معادلات موازنه نیرو هستند
$frac{ B_{\rm y}}{F} = \tan^{-1} \left( \frac{a}{b} \sin \theta \right)$و تعادل تورک در پیوته
$(a+b-x) B_{\rm y} - \tfrac{L}{2} m g \cos \theta = 0 $
تمام معادلات فوق (4 معادله و 4 مجهول) نیروی درایو مورد نیاز را محاسبه میکنن$boxed{ F = \tfrac{L}{2} m g \frac{ \cos \theta \sqrt{b^2-a^2 \sin^2 \theta}}{a ( a+b-x) \sin \theta} }$
توجه داشته باشید که اوج بار زمانی اتفاق میفته که در حداقل زاویه ای که مکانیسم در آن قرار میگیره
من می تونم نیرو را در زوایای کوچک به صورت تقریبی تخمین بزنم
$F \approx \tfrac{L}{2} \frac{b \,m g}{a(a+b) \sin \theta}$
برای یافتن ترکیب ab و θ که با درایوم مطابقت دارهاز موارد بالا استفاده میکنم.
انواع اکچویتور (Actuator) از منظر عامل حرکت
از نگاه زاویه چرخش میتونم اکچویتور را به دو دسته زیر تقسیم کنم
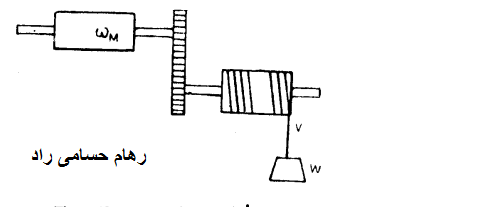
اینرسی به شفت موتور اشاره داره
آیا این معادله برای یک موتور سیستم مکانیکی معین معتبره
من میخوام که باکس اینرسی کل را میتوان به صورت بیان کرد
$\{1}{2}J'_m\omega^2=\frac{1}{2}J_m\omega^2+\frac{1}{2}mv^2.$
ممان اینرسی معادل به شفت موتور $J'_m$ است
.این را استادم گفته است فکر می کنم اینجا مشکلی وجود داره. من در این مورد تردید دارم زیرا نمیتونم در مورد اضافه کردن هر دو عبارت و ارجاع آنها به عنوان اینرسی کل به شفت موتور صحبت کنم.
. این تورک جرمی معادل اینرسی نامیده میشه و اغلب در مسائل دینامیک سیستم برای ساده کردن چیزها استفاده میشه.
در این موردم اینرسی معادل$J'_m$
با معادله داده میشه
$J_m^\prime = \left[\frac{1}{2}J_m \omega^2 + \frac{1}{2} m v^2\right]\left[\frac{2}{\omega^2}\right]$یا
$J_m^\prime = J_m + m \left(\frac{v}{\omega}\right)^2$اگر گیج شدهایدبه این شکل فکر کنید: اینرسی در واقع معیاریه که نشان میده چقدر انرژی برای کند کردن یک جسم متحرک تا توقف نیاز داره. میدونم که این تنها در صورتی کار میکنه که گیربکس بدون تلفات وجود داشته باشه
خوب باید تورکی را که موتور باید برای یک شتاب زاویه ای معین$\alpha$ تولید کندتعیین کنم.
. باید بدونم که$T_m = J_m \alpha + rma/n$
جایی که r شعاع درام و n ضریب دنده است است. جایگزینی$\alpha r/n$
برای $a$ و هر دو ضلع را بر$\alpha$ تقسیم میکنم
بازده - $\frac{T_m}{\alpha} = J_m + m \left(\frac{r}{n}\right)^2$که معادل عبارتی است که در بالا یافتم.
نادیده گرفتن اینرسی در چرخ دنده ها و درامبا فرض نسبت دنده 1و نشان دادن شعاع درام با r
انرژی جنبشی کل سیستم است
$T=\frac{1}{2}J_m\omega_m^2+\frac{1}{2}m v^2=\frac{1}{2}J_m\omega_m^2+\frac{1}{2}m r^2\omega_m^2=\frac{1}{2}(J_m+mr^2)\omega_m^2$بنابراین ممان اینرسی معادل $J_m+mr^2$ است
