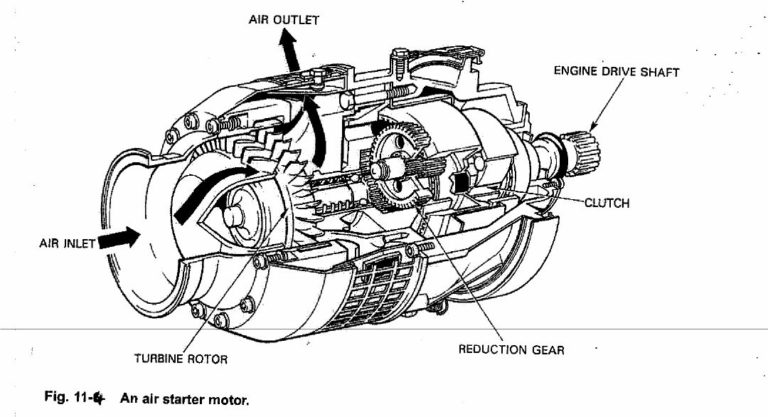
سیستم استارت موتور:
در سیستم استارت موتور استارتر باید یک نیروی مکانیکی تولید کند تا آن نیروی مکانیکی توسط گیربکس به شفت اصلی کمپرسور منتقل شده و باعث چرخیدن کمپرسور شود زمانی که دور موتور به ۱۵ درصد رسید اتاقک احتراق روشن میشود و زمانی که دور موتور به ۳۵ درصد رسید کلا استارتر خاموش میشود استارتر ها دارای چند نوع مختلف هستند
استارتر موتور الکتریکی :این نوع استارتر در اصل یک موتور الکتریکی است که نیروی الکتریکی را به نیروی مکانیکی تبدیل میکند چیزی شبیه به آرمیچر ،حال این نیروی مکانیکی تولید شده توسط این استارتر توسط گیربکس به محور اصلی کمپرسور منتقل شده و آن را میچرخاند
استارتر نوع سوخت جامد: این نوع استارتر از نوع سوخت جامد است که سوخت جامد در اتاقک احتراق قرار گرفته و با شروع به سوختن سوخت و صورت گرفتن احتراق گاز داغ حاصله به سمت یک توربین حرکت میکند و توربین انرژی گرمایی گاز را به انرژی مکانیکی تبدیل کرده و این انرژی مکانیکی توسط گیربکس به شفت اصلی کمپرسور منتقل شده و آن را میچرخاند .
استارتر سوخت مایع:این نوع استارتر کارکردی مشابه سوخت جامد دارد که توضیح داده شد فقط فرقش این است که با سوخت مایع کار میکند.
سیستم APU:
کلمه APU مخفف AUXALARY POWER UNIT
میباشد که این نوع استارتر یک نوع موتور توربوشفت بوده که در محلی در زیر سکان عمودی هواپیما قرار میگیرد این APU هوا را در کمپرسور خود فشرده کرده و سپس این هوا را به توربین استارتر اعمال میکند و باعث چرخیدن توربین میشود که این نیروی مکانیکی از طریق یک گیربکس به شفت اصلی کمپرسور اعمال شده و آن را میچرخاند . Apu میتواند از پمپ های هیدرولیک سیستم های الکترونیکی و سیستم تهویه هوا پشتیبانی کند.
استارتر GPU
استارتر GROUND POWER UNIT
که به آن GPU گفته میشود در اصل همان APU است ولی در هواپیما نیست و سیستمی جداگانه از هواپیما بر روی زمین است که این هم خود یک موتور توربوشفت است که هوای فشرده در کمپرسور خود را به توربین استارتر اعمال میکند و باعث چرخیدن توربین میشود و این نیروی مکانیکی حاصله توسط گیربکس به شفت اصلی کمپرسور منتقل شده و باعث چرخیدن آن میشود .
استارتر نوع توربین هیدرولیکی :.
در این نوع، استارتر تنها یک توربین است که توسط سیال هیدرولیک به چرخش در میآید و این نیروی مکانیکی توسط گیربگس به شفت اصلی محور کمپرسور منتقل شده و آن رد میچرخاند.
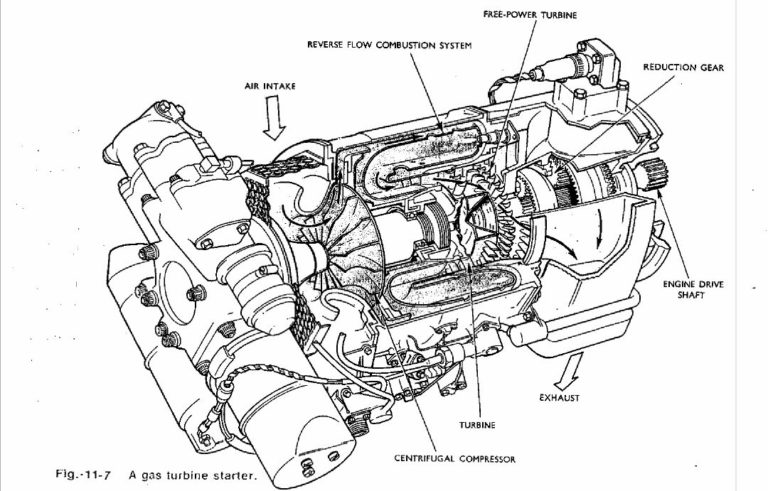
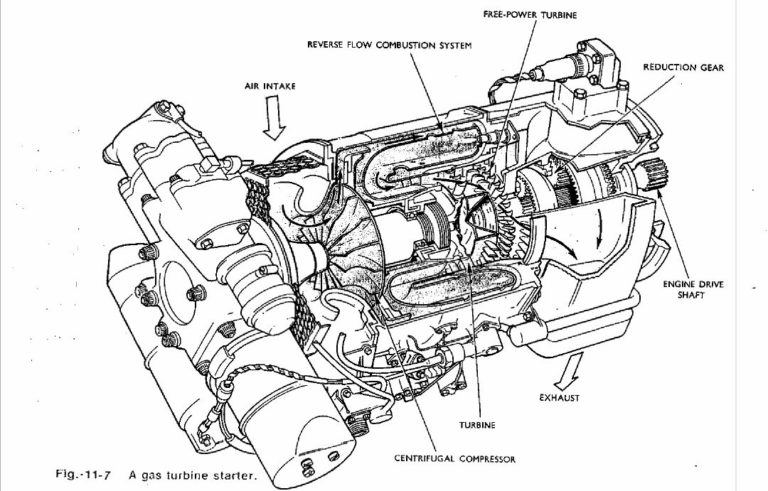
استارتر از نوع توربین گازی :
این نوع در اصل یک موتور توربوشفت بوده که که نیروی مکانیکی حاصله آن توسط گیربکس به شفت کمپرسور منتقل شده و باعث چرخیدن آن میشود
جرقه شمع :
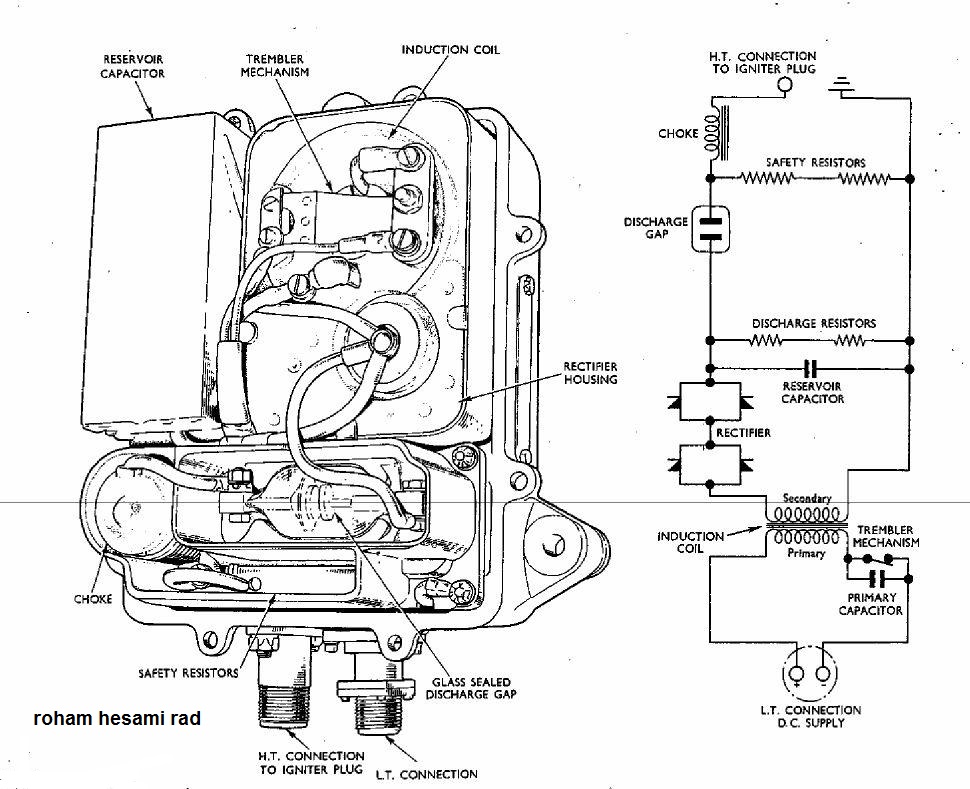
در اتاقک های احتراق دو شمع وجود دارد شمع انرژی الکتریسیته خود را از آلترناتور یا ژنراتور دریافت کرده که یک جریان برق ۱۱۵ ولتی AC است که با آن در اتاقک احتراق جرقه میزند
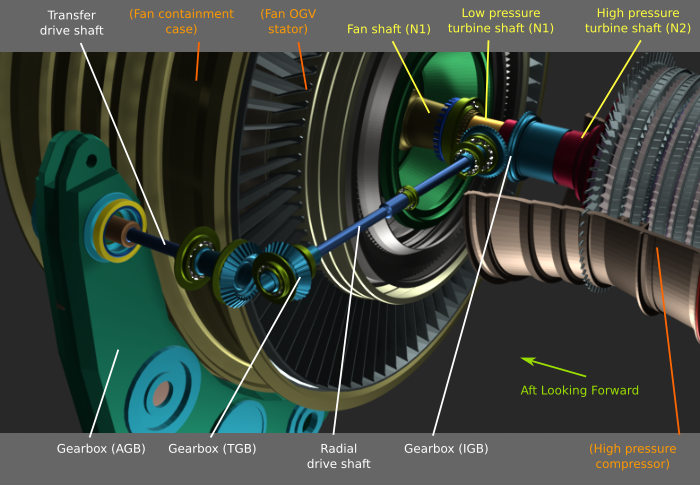
گیربکس :
گیربکس یک جعبه یا باکسی است که درون آن چندین چرخ دنده متصل به یکدیگر قرار دارند و این چرخدنده ها کاملا با یکدیگر هماهنگ بوده گیربکس اصلی در روی موتور قرار میگیرد و دو گیربکس فرعی در پایین و کناره های موتور قرار میگیرند کار اصلی گیربکس انتقال قدرت است مثلا انتقال نیرو از استارتر به شفت کمپرسور یا انتقال نیرو از موتور به پمپ ها هیدرولیک و روغن و یا انتقال قدرت از موتور به ژنراتور ها و مهیا کردن انرژی مکانیکی ژنراتور ها .
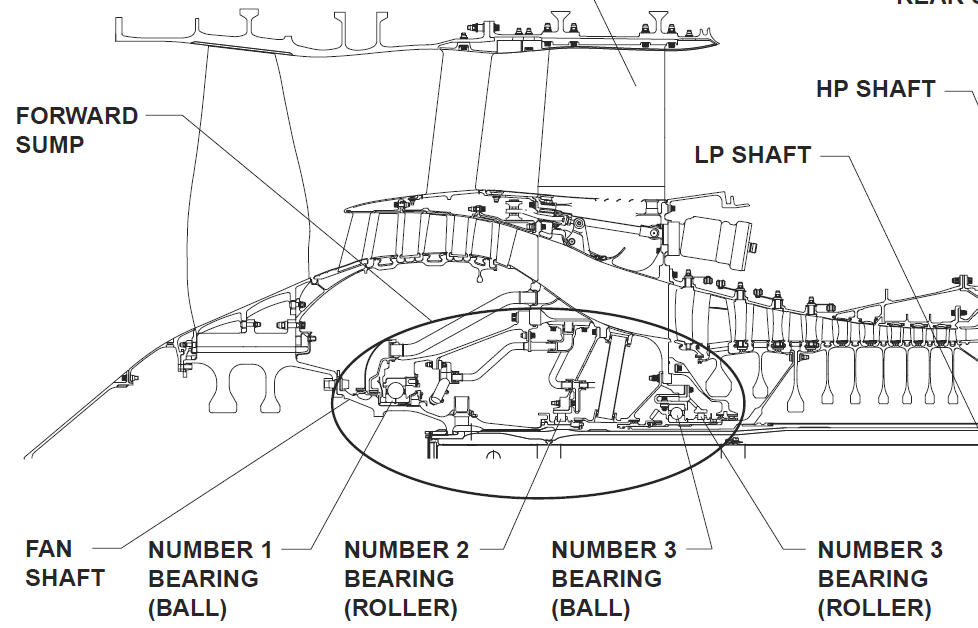
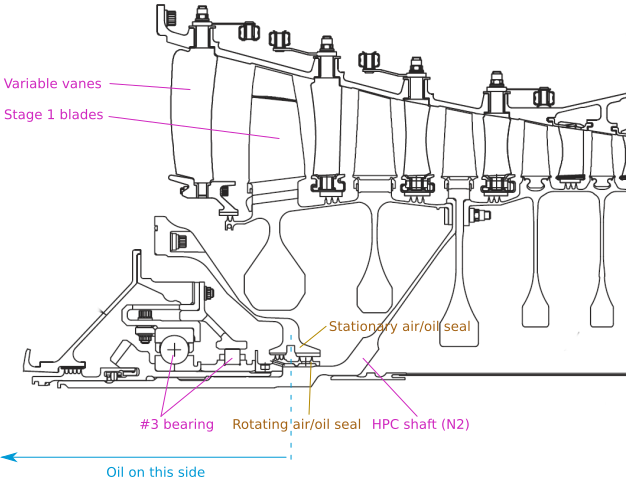
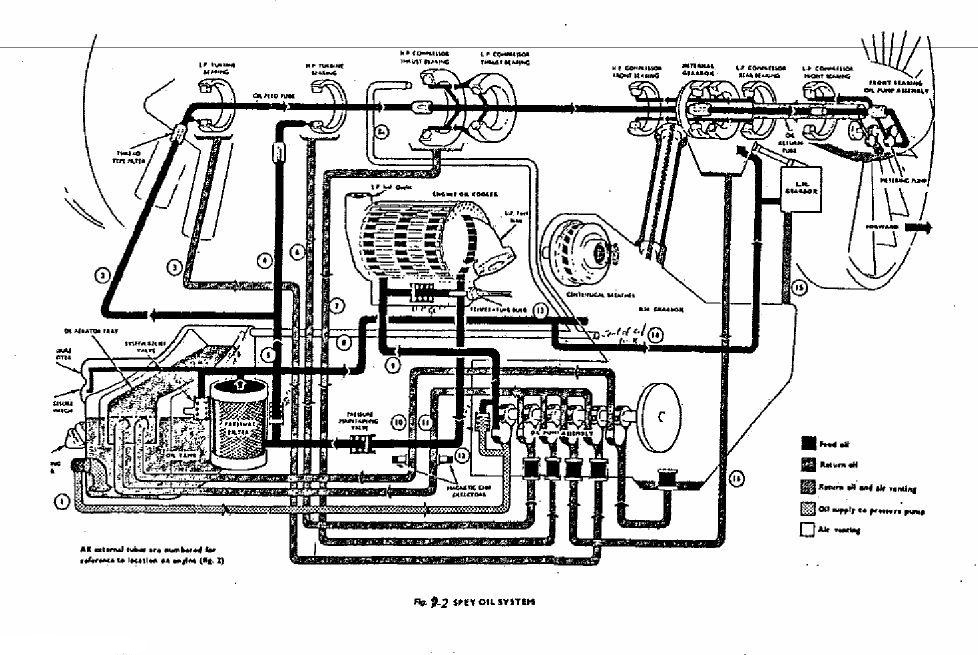
سیستم روغن کاری :
بعضی از قطعات که بیشتر در تماس هستند برای جلوگیری از اصطحکاک و خوردگی باید روغن کاری شوند مثلا مثل قطعاتی همچون برینگ ها و شفت کمپرسور موتور و چرخدنده های گیربکس .مخزن روغن در روی موتور قرار میگیرد و پمپ روغن که از نوع چرخنده ای است که با چرخیدن چرخدنده ها باعث مکیدن روغن میشود و روغن بعد از بیرون آمدن از مخزن توسط سوخت خنک شده و از فیلتر ها میگذرد و دما و فشار آن اندازه گیری میشود و سپس قطعات روغن کاری شده و در نهایت توسط پمپ روغن به دوباره به داخل مخزن کشیده میشود
سیستم سوخت رسانی
در هواپیما های مسافربری معمولا مخزن های سوخت درون بال ها قرار میرند و دلیل اینکه مخزن ها در بال قرار میگیرند این است که فضای درون بدنه استفاده نمیشود بنابراین میشود مسافر یا بار بیشتری حمل کرد از جهتی دیگر چون بال ها وظیفه تولید نیروی لیفت را بر عهده دارند با تولید نیروی لیفت خود بال به سمت بالا خم مشود که وقتی مخزن سوخت درون بال باشد باعث سنگین تر شدن بال میشود در نتیجه باعث میشود بال خیلی به سمت بالا متمایل نشود
مخزن سوخت ها در کل به سه نوع تقسیم میشوند
نوع BUILT UP TANK
این نوع مخزنی آلومینیومی است و قابل جدا شدن
نوع INTEGER TANK
نوعی آلومینیومی که در هواپیما های مسافربری کاربردی است
نوع FUEL CELL TANK
نوعی که در هواپیما های کوچک و سبک به کار میرود
حال بخواهیم به طور کلی به مخزن ها نگاه کنیم مخزن سوخت ها به سه دسته تقسیم میشوند نوع اول آلومینیومی قابل جدا شدن که میشود آن را جدا کرد و شست ، نوع دوم آلومینیومی غیر قابل جدا شدن و نوع سوم از جنس موادی مشابه لاستیک هستند که انعطاف پذیر اند و این مدل معمولا در جنگنده ها بکار میرود که در مقابل مانور های شدید با توجه به انعطاف پذیری که دارد مشکلی برایش پیش نمی آید
در درون مخزن سوخت صفحاتی مانند توری بکار رفته است که باعث میشود در مانور های شدید سوخت ثابت بماند و همچنین مخزن سوخت از راه کانالی با هوای بیرون در تماس است که به این سیستم VENT میگویند این سیستم برای تنظیم فشار سوخت بکار میروند .
سیستم سوخت رسانی برای کشیدن سوخت به بیرون از پمپ های پر فشار و هم پمپ های کم فشار استفاده میکند که این پمپ ها با نیروی الکتریسیته کار میکنند .بعد از اینکه سوخت توسط پمپ از مخزن بیرون کشیده شد سیستم روغن کاری را خنک میکند و از فیلتر میگذرد و توسط مبدل های حرارتی دمایش تنظیم میشود و فشار سنج ها فشار سوخت را اندازه گیری میکنندو در این مسیر شیر ها VALVE جریان سوخت را هدایت میکنند مثل شیر های انتخاب و انتقال و شیر قطع کننده جریان و بعد از تمامی این مراحل سوخت وارد سیستم FCU یا همان FUEL CONTROL UNIT
میشود که این سیستم وظیفه اش این است که میزان سوخت ورودی به اتاقک احتراق را کنترل کند مثلا زمانی که خلبان دسته گاز تراتل را به سمت جلو فشار میدهد FCU میزان سوخت بیشتری را روانه اتاقک احتراق میکند که باعث افزایش رانش میشود در کل سیستم های FCU دو نوع هستند نوع اول مدل مدار باز که تنها به فرامین ارسالی از کابین که همان حرکت دسته گاز است کنترل میشوند و نوع دوم نوع مدار بسته است که علاوه بر فرامین ارسالی از کابین یا همان حرکت دسته گاز با توجه به پارامتر های دیگری همچون میزان هوای ورودی به موتور و دور موتور کار میکنند و جریان سوخت را کنترل میکنند .سیستم های FCU کلا به سه صورت هیدرولیکی مکانیکی و الکتریکی کار میکنند
قطعات FCU
سیستم FCU دارای قطعاتی حساس به دور موتور و هوای ورودی است که با بدست آوردن این پارامتر ها جریان سوخت را کنترل میکند و همچنین دارای شیر های قطع کننده جریان و شیر های تخلیه است و همچنین سیستم FCU دارای سامانه محدود کننده جریان سوخت است تا اگر در شرایطی رانش از ماکزیمم بیشتر شد این سامانه محدود کننده میزان سوخت ورودی به اتاقک احتراق را کاهش دهد و در نهایت سوخت بعد از عبور از فیلتر ها وانژکتور بصورت پودر به درون اتاقک پاشیده میشود تا به سرعت تبخیر شده و با هوای درون اتاقک مخلوط شود و بلافاصله بعد از جرقه شمع بطور کامل بسوزد .
سیستم تزریق آب :
اگر شرایط جوی طوری باشد که باعث شود موتور به ماکزیمم رانش نرسد در این شرایط سیستم تزریق آب محلول آب و الکل را به موتور تزریق میکند که این باعث افزایش حجم airflow و افزایش فشار سیال میشود که نتیجه افزایش رانش است
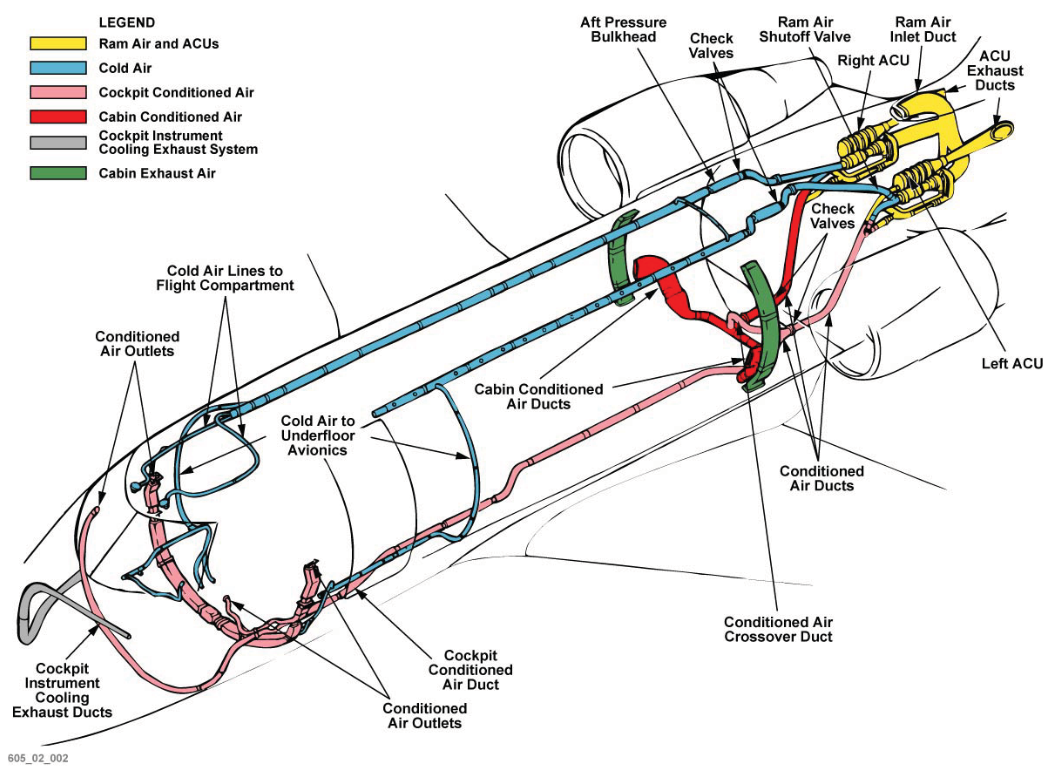
سیستم تهویه هوا
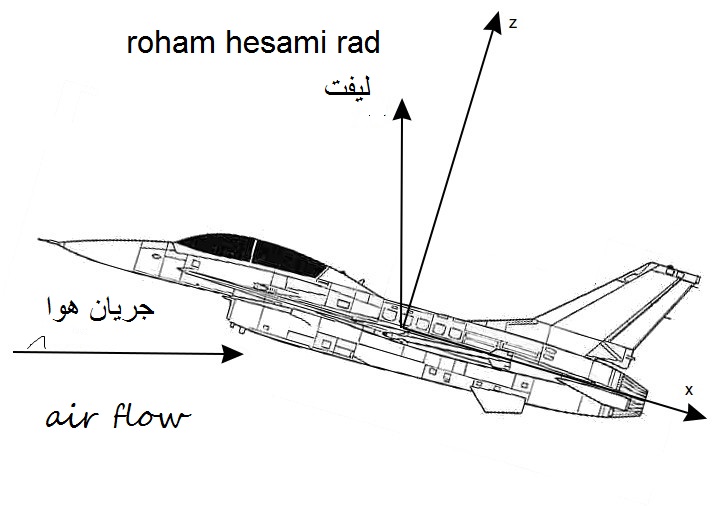
هر چقدر که ارتفاع زیاد تر میشود فشار هوا نیز کاهش میابد و مثلا زمانی که یک هواپیما در حال پرواز در ارتفاع ۳۰۰۰۰ پایی است در این ارتفاع فشار هوا برای سرنشینان هواپیما مناسب نخواهد بود بنابراین باید هواپیما طوری ساخته شود که زمانی که در حال پرواز در ارتفاع بالا است فشار و هوای کابین چه از لحاظ دما چه از لحاظ فشار برای سرنشینان مناسب باشد با توجه به این مسئله هواپیما دارای سیستم تهویه پیچیده ای است موتور تامین کننده اصلی هوای درون کابین است هوای درون هواپیما از کمپرسور موتور گرفته میشود و راهی کمپرسور دیگری برای افزایش فشار میشود و با عبور از این کمپرسور به PRIMARY HEAT EXCHANGER
میرسد که در اینجا دمایش تنظیم میشود و بعد از این مرحله وارد کمپرسور دیگری برای افزایش مجدد فشار میشود و بعد از این مرحله وارد SECONDARY HEAT EXCHANGER
میشود که در اینجا دوباره دمای هوا تنظیم شده و در نهایت هوا وارد کابین میشود
دما یکی از نکات بسیار مهم در سیستم تهویه هوا است برای سرد کردن هوا از گاز فرون استفاده میشود که هوای دریافتی از کمپرسور موتور در صورت تماس با گاز فرون خنک میشود چون گاز فرون با بخار شدن دمای هوا را میگیرد و همچنین این هوای خنک گاهی برای خنک سازی سیستم های اویونیکی درون دماغه هم بکار میرود و برای گرم کردن هوا هم گاهی از مبدل های حرارتی و گاهی هم از اتاقک احتراق جداگانه ای بهره میبرند و این هوای گرم یرای یخ زدایی و همچنین برای خشک کردن شیشه های WINGSHIELD کابین بکا میرود.
برای تهیه هوای ماسک اکسیژن اضطراری هوای دریافتی از کمپرسور مستقیم وارد یک رگلاتور فشار شده و پس از تنظیم فشار توسط این سیستم وارد ماسک میشود .
علاوه بر اینکه هواپیما دارای سیستم های تهویه هوای پیچیده و پیشرفته ایت در کنار این بدنه هم طوری ساخته شده که در مقابل اختلاف فشار هوای درون و بیرون کابین مقاوم باشد برای مثال شیشه های هواپیمای مسافربری سه لایه است تا در نقابل این اختلاف فشار مقاوم باشد به علاوه شیشه های هواپیمای مسافربری دارای سوراخ هایی برای تنظیم فشار هم میباشد .
سیستم هیدرولیک
سیال هیدرولیک در هواپیما وظیفه انتقال فشار و قدرت را بر عهده دارد سیال هیدرولیک در هواپیما از سه نوع مختلف است نوع اول از جنس روغن های گیاهی نوع دوم از جنس مواد های نفتی نوع سوم از جنس فسفات استر که هواپیما های امروزی از نوع فسفات استر استفاده میکنند یک نوع سیال هیدرولیکی که امروزه در هواپیما ها استفاده میشود SKYDROL میباشد که این مایع بنفش رنگ است خدمه فنی در حال کار با سیال هیدرولیک حتما باید نکات فنی ایمنی را در نظر بگیرند و رعایت کنند مثلا نباید به سیال هیدرولیک دست بزنند و سیال هیدرولیک مخصوص آن هواپیما را بدان تزریق کنند یا سعی کنند آشغال با سیال هیدرولیک مخلوط نشود .
توضیح قسمت های مختلف سیستم هیدرولیک :
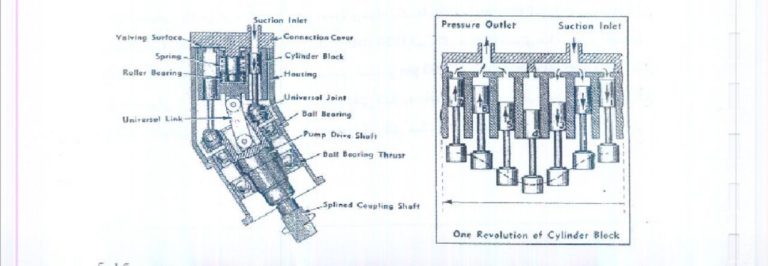
سیستم هیدرولیک در اصل سیستم انتقال قدرت و کنترل پرواز است مثلا برای بکار انداختن ارابه فرود و فلپ ها و شهپر ها و رادر ها و الویتور ها به سیستم هیدرولیک نیاز است یکی از اجزا سیستم هیدرولیک مخزن آن است که سیال در آن جمع میشود و سیال هیدرولیک میتواند دارای چند نوع پمپ باشد که انواع آن بدین شرح است پمپ پیستونی ، پمپ جی روتور ،پمپ ملخی ،پمپ چرخدنده ای ، پمپ چند سیلندری که این نوع در هواپیما های مسافربری امروزی کاربرد دارد پمپ کارش ایجاد جریان در سیال است و پمپ ها با موتور خود هواپیما کار میکنند یعنی اگر موتور هواپیما از کار افتاد پمپ های هیدرولیک دیگر کار نمی کنند . سیستم هیدرولیک دارای فیلتر هایی برای از صافی گذراندن سیال و مبدل های حرارتی برای تنظیم دمای سیال هستند و همچنین سیستم هیدرولیک دارای سوئیچ های فشار مختلف برای تنظقم فشار و شیر های VALVE مختلف برای کنترل جریان سیال هستند دو تا از اجزا مهم سیستم هیدرولیک اکومولاتور و رگلاتور فشار هستند زمانی که هواپیما در حالت کروز در حالت پرواز است در این حالت تمامی فشار کار بر روی پمپ است که در حال ایجاد فشار در سیستم است ولی اکومولاتور ویا رگلاتور فشار ،این فشار را بر روی سیال اعمال میکنند و این باعث میشود که بار کاری بر روی دوش پمپ کمتر شود در نهایت سیال هیدرولیک از طرفی به سیلندر عملگر فشار میارود و نیروی هیدرولیکی آن به نیروی مکانیکی تبدیل میشود و باعث انجام کار مثل باز کردن ارابه فرود میشود.
سیستم نیوماتیکی:
سیستم نیوماتیکی نوعی سیستم هیدرولیکی است که در این سیستم بجای سیال مایع از هوای فشرده شده استفاده میشود که تراکم پذیر است سیستم نیوماتیکی برای زیرسیستم ها و در حالت اضطراری بکار میرود .
سیستم هیدرولیک
بدنه هواپیما قسمت اصلی هواپیما میباشد که بال ها و سکان های عمودی و افقی بدان وصل شده اند.
ساختمان بدنه و بال هواپیما
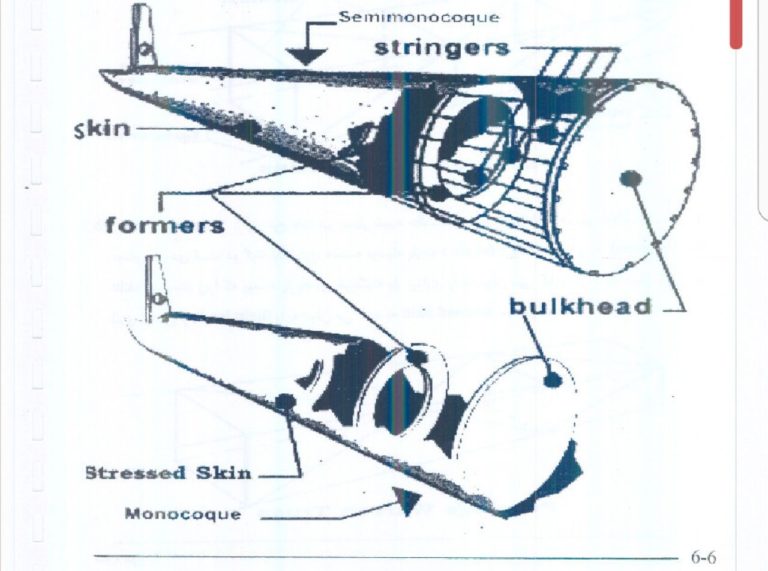
بدنه هواپیما از سه نوع مختلف میباشد تراس مونکوک و سمی مونکوک
تراس به نوعی از بدنه هواپیما میگویند که از به هم متصل شدن چند میله و پوشاندن آن با پوسته خاصی شکل میگیرد بدنه تراس به دو نوع تقسیم میشود پرت تراس و وارن تراس که در پرت تراس میله ها هم بصورت عمودی و افقی و مورب به یکدیگر متصل اند ولی در نوع وارن تراس میله ها به صورت مورب و افقی به یکدیگر متصل شده اند و نوع دیگر بدنه هواپیما مونکوک است که این نوع بدنه از به هم پیوستن حلقه های دایره ای شکل تشکیل شده و نوع دیگر بدنه ها سمی مونکوک است که این نوع از دایره های حلقه ای شکل متصل به یکدیگر تشکیل شده و PRESSURIZED شده و در مقابل اختلاف فشار هوا هم مقاوم هستند این نوع بدنه ها در هداپیما های مسافربری امروزی کاربرد دارند.
ساختمان بدنه :
بدنه هواپیما از یک دیواره مرزی و ستون های مستحکم کننده اصلی و فرعی تشکیل شده و در یک قالب شکل گرفته که آن قالب با استفاده از یک پوسته پوشانده شده است هرچقدر پوسته ضخیم تر و هر چه میله ها به یکدیگر نزدیک تر باشند بدنه لرزش کمتری خواهد داشت .
ساختمان بال هواپیما:
ساختمان بال هواپیما کلا از دو جز ریب و SPAR تشکیل شده که RIBS همان دنده های عرضی هستند که از لبه حمله تا لبه فرار بال کشیده شده اند و باعث ایجاد یک شکل دوکی شکل در سطح مقطع بال شده اند و همچنین به بال یک حالت ایرفویلی داده اند و همچنین بال دارای مستحکم کننده ها هم هست همانند استینگر ها که به پوسته متصل میشوند و باعث میشوند پوسته در مقبال تنش ها مقاوم باشد و در مقابل فشار هوا سر نخورد و جز دیگر بال SPAR یا همان تیرک اصلی بال است که RIB ها را به یکدیگر متصل کرده و مستحکم کننده اصلی بال است
ارابه فرود:
ارابه فرود از نظر ظاهری بسیار ساده بنظر میاید ولی در واقع طراحی و سیستم ارابه فرود پیچیده است
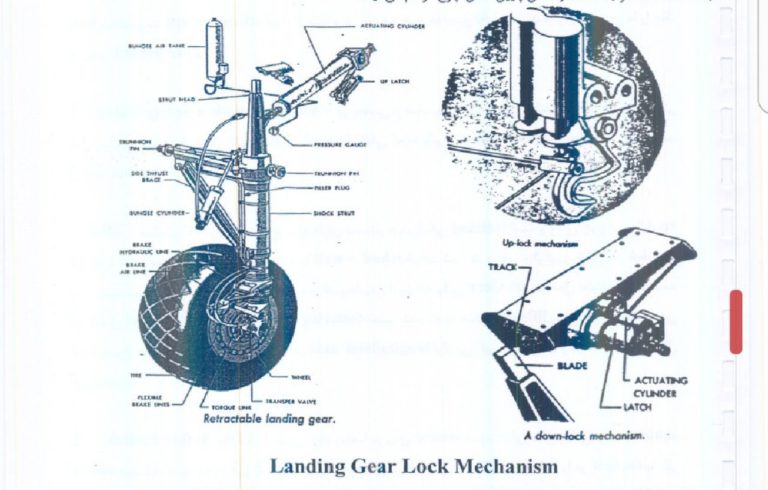
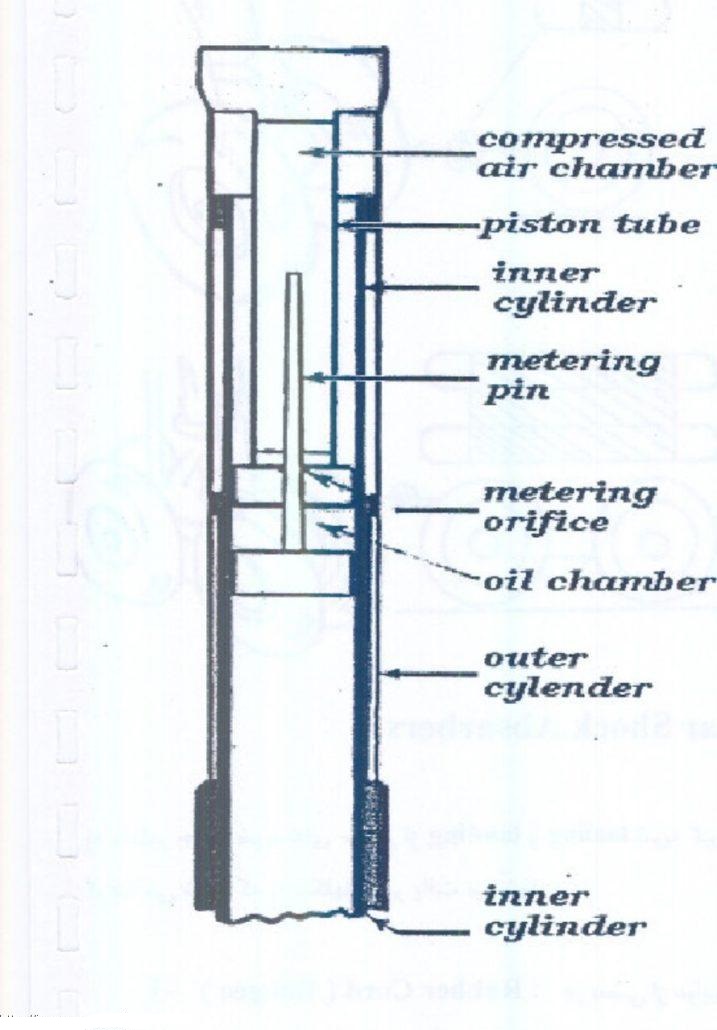
ارابه فرود از یک استوانه اصلی بنام strut تشکیل شده و این strut توسط قطعه ای به نام torsion به بدنه وصل شده و توسط قطعه ای بنام axle به تایر ها متصل است و تایر ها هم توسط قطعه ای بنام truck به یکدیگر متصل اند قطعه strut در اصل یک سیلندر است با توجه به اینکه در حین لندینگ فشار زیادی به strut وارد میشود بنابراین درون استرات از روغن و هوای فشرده تشکیل شده اند که در حین لندینگ این روغن و هوای فشرده درون استرات همانند فنر عمل میکنند و از ضربه شدید جلوگیری میکنند و قطعه ای بنام torque link وجود دارد که از ضربه زدن پیستون درون strut به بدنه جلوگیری میکند .با توجه به اینکه اگر ارابه فرود باز باشد درگ زیادی تولید میکند و باید جمع شود مکانیزمی برای جمع کردن اراب۶ فرود هم وجود دارد ارابه فرود بصورت هیدرلیکی در هوایپیما های بزرگ جمع میشوند که با نیروی وارده با یک سیلندر عملگر هیدرولیک ارابه فرود جمع یا با میشود زمانی که ارابه فرود باز شد باید کاملا قفل شود تا بتواند هوامیما را سالم بر روی زمین نشانده و به حرکت در آورد زمانی که ارابه فرود بسته است چراغی در داخل کابین بصورت ارغوانی رنگ است و زمانی که ارابه فرود در حال بار یا بسته شدن است و هنوز قفل نشده آن چراغ به رنگ قرمز است و زمانی که ارابه فرود باز و قفل شد چراغ به رنگ سبز در میآید . برای کنترل زمینی ارابه فرود یعنی منحرف کردن آن به سمت راست یا چم برای تاکسی کردن هواپیما بر روی زمین از سیستم های هیدرولیگی و مکانیکی استفاده میشود و ترمز های هواپیما یا از نوع دیسکی یا از نوع کاسه ای میباشد که با فشار هیدرولیکی کار میکند.
ارابه فرود
لباس خلبانی و g suit
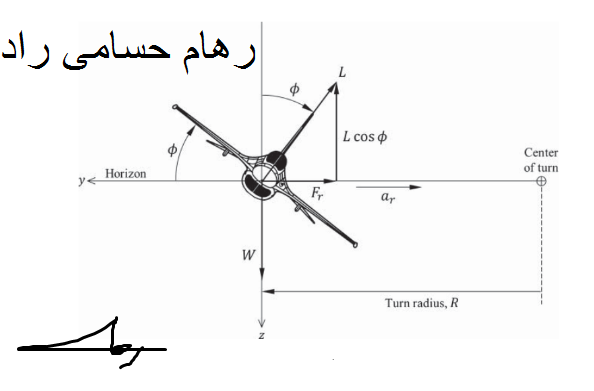
قبل از توضیح درباره صندلی های پرتاب شونده بهتر است درباره فشار g کمی توضیح بدهیم زمانی خلبان هواپیما جنگنده ای مستقیما در حال ارتفاع گرفتن است در این حالت دارد خلاف جهت طبیعی طبیعت عمل میکند بنابراین فشار g بالا میرود و یک خلبان میتواند تا ۹ جی را نهایتا تحمل کند بعد از این خون به مغزش نمیرسد و چشمش سیاهی میرود و بی هوش میشود به این حالت بلک اوت میگویند و در هر حالت عکس فوق زمانی که خلبان جنگنده مستقیم به سمت پایین با سرعت بالا در حال کاهش ارتفاع یا سقوط به پایین است در این حالت دارد در جهت طبیعت با سرعت خیلی بالاتر عمل میکند که این باعث میشود g منفی شود و هر خلبانی تا 3- را میتواند تحمل کند و در پایین تر از این عدد خون در سر خلبان جمع شده و چشم خلبان همه جا را قرمز میبیند و بیهوش میشود که به این حالت red out میگویند حال لباس خلبانی یا همان g suit هم در مقابل فشار g مقاوم است در لباس خلبانی لایه ای وجود دارد که حالا با یک سیال مایع یا گاز پر میشود که خلبان در مقابل فشار g بیشتر مقاوم باشد
در هواپیما هایی مثل SR71 که تا ارتفاعات بسیار بالا مثل ۸۵۰۰۰ پایی پرواز می کنند علاوه بر اینکه کابین تحت فشار است خلبان نیز لباسی مشابه لباس فضانوردی میپوشد تا فشار بدنش تنظیم شود.
صندلی پران از چهار قسمت تشکیل شده پراتب کننده، موتور های راکتی ، مهار و بند ، چتر
خلبان با کشیدن طنابی در بالای سر خود اقدام به ایجت میکند و زمانی که طناب مذکور را به جلوی صورت خود میکشد در همین زمان پوششی جلوی صورت اورا میگیرد تا در مقابلی فشار هوا دچار جراهات نشود و سپس پرتابگر صندلی را به اول ریل میآورد و سپس کاتریج اقدام به پرتاب کانوپی میکند ولی در بعضی جنگنده ها همانند هاریر کانوبی با استفاده از خرج خرد میشود و سپس موتور های راکتی در زیر صندلی پرتاب شده و خلبان و صندلی را به سمت بیرون پرتاب میکند این فرآیند بسیار پیچیده که سیستم ها باید طوری طراحی شوند که بعد از پرتاب کانوپی صندلی شلیک شود و اگر اول صندلی شلیک شود باعث مرگ خلبان میشود و همچنین باید صندلی طوری پرتاب شود که به سکان عمودی جنگنده هم بر خورد نکند.
در زیر صندلی پرتاب شونده بسته ای قرار دارد که به بقا و زنده ماندن خلبان بعد از ایجکت کمک می کند این بسته شامل یک قایق بادی و یک پودری که اگر خلبان در داخل آب افتاد آن پودر را درون آب بریزد و با توجه به اینکه کوسه ها از این پودر متنفرن پراکنده میشوند و یک چاقو بسیار تیز که سیم مفتول را هم میشود باهاش برید و جعبه کمک های اولیه قلاب ماهیگیری منور و آینه برای علامت دادن و چند وسیله دیگر …..
کارایی بالچه های هواپیما
فلپ flap : این بالچه که در لبه فرار بال قرار میگیرد از نوع برا افزا بوده و باعث افزایش لیفت میشوند
شهپر aileron : شهپر ها که در قسمت بیرونی بال در لبه فرار نصب میشوند برای حرکت در جهت roll استفاده میشوند اگر خلبان دسته یوک را به سمت راست بچرخاند شهپر سمت راست به سمت بالا رفته و شهپر سمت چپ به سمت پایین می آید در این صورت حرکت رول به سمت راست انجام میگیرد
اسلت slat : این بالچه از نوع براافزا میباشد که در لبه حمله بال نصب میشود و با کنترل جریان هوا باعث افزایش برا میشود .
سکان افقی متحرک elevator :
الویتور ها بالچه هایی هستند که به سکان افقی وصل شده اند و برای حرکت در جهت pitch به کار گرفته میشوند زمانی که خلبان دسته یوک را به سمت عقب میکشد الویتور ها به سمت بالا خم شده و با فشار هوای اعمال شده دماغه به سمت بالا متمایل میشود و در صورتی که خلبان دسته یوک را به سمت جلو فشار دهد عکس العمل عکس خواهد داشت
بالچه rudder : این بالچه ها که به سکان عمودی متصل اند برای انحراف در جهت yaw استفاده میشود زمانی که خلبان پدال rudder سمت راست را فشار دهد رادر به سمت راست منحرف شده و با فشار هوای اعمال شده هواپیما به سمت راست منحرف میشود و اگر خلبان پدال رادر سمت چپ را فشار دهد برعکس.
و trim tab ها بالچه هایی هستند که در اصل قسمت لولا شده از فلپ یا رادر هستند که برای بالانس هواپیما کارایی دارند.
آلات دقیق
آلات دقیق در کل به ۳ قسمت تقسیم میشوند آلات دقیقی که وضعیت موتور را نشان میدهند آلات دقیق که وضعیت سیستم ناوبری و پرواز را نشان میدهند و آلات دقیقی که وضعیت سیستم های دیگر همانند سیستم هیدرولیک را نشان میدهند آلات دقیق به چهار نوع مختلف کار میکنند الکتریکی فشاری ژیروسکوپی مکانیکی ،
برای اندازه گیری فشار های بالا از لوله بوردون استفاده میشود که این لوله از یک جهت به یک سری سیستم ها همانند یک فنر از برنج متصل است و از یک طرف به سیالی که فشارش را باید اندازه گرفت و آن سیال با فشاری که به فنر اعمال میکند باعث تغییر حرکت گیج و اندازه گیری فشار میشود و این سیستم بیشتر برای فشار بالا بکار میرود نوع دیگر از نوع دیافگرام است این فشار سنج از دو صفحه چین خورده متحد المرکز تشکیل شده است که در داخل آن با گاز خاصی آب بندی شده زمانی و زمانی که گاز از لوله pitot گرفته شده و وارد دیافگرام میشود با توجه به میزان انبساطی که دیافگرام خواهد داشت فشار اندازه گیری میشود یکی از آلات دقیق که کاملا با فشار هوا کار میکند altimeter ید همان ارتفاع سنج است همانطور که قبلا گفتیم هر چه ارتفاع بیشتر شود فشار کاهش میتبد و اینجا این فشار معیاری برای اندازه گیری فشار است که با هوای وارد شده از لوله pitot و سپس ورود هود به دیافگرام فشارش اندازه گیری میشود و ارتفاع مشخص میشود ارتفاع سنج را میشود به چنو نوع تنظیم کرد نوع QNH که بر حسب فشار سطح دریا است یعنی در این حالت اگر هواپیما بر روی زمین بالاتر از سطح دریا باشد ارتفاعی بالا تر از صفر را نشان میدهدو نوع دیگر تنظیم QNE است که بر حسب فشار استاندارد است فرض کنید هواپیمایی بر روی فرودگاهی قرار دارد و ارتفاع سنجش ۰ را نشان میدهد بعد از تیک آف و پرواز دمای هوا تغییر می کند با توجه به اینکه دما تغییر کرده پس فشار هوا هم تغییر کرده پس در صورت لندینگ دوباره هواپیما ،ارتفاع سنج ارتفاع ۰ را دوباره نشان نخواهد داد و باید تنظیم شود در آلتیمیتر بزرگترین عقربه هر ۱۰۰ پا را نشان میدهد و عقربه کوچکتر ۱۰۰۰ پایی و کوچکترین عقربه ۱۰۰۰۰ پایی را نشان میدهد.
از جمله دیگر آلات دقیق که با فشار هوا کار میکند AIR SPEED است که همان سرعت سنج میباشد که با توجه به هوای ورودی از لوله پایتوت سرعت را مشخص میند و همچنین آلات دقیق MACH NUMBER هم برای اندازه گیری سرعت بکار میرود ولی در سرعت های فراصوتی.
آلات دقیق MAINFOIL PRESSURE برای اندازه گیری فشار مخلوط سوخت و هوا بکار میرود
آلات دقیق FUEL INDICATOR برای اندازی گیری میزان سوخت بکار میرود که نوع جدیدش با خازن کار میکند
و آلات دقیق OIL PRESSURE برای اندازه گیری فشار روغن و FUEL PRESSURE و FUEL TEMP به ترتیب برای اندازه گیری فشار سوخت و دمای سوخت
تراست سنج یا THRUST METER آلات دقیقی است که برای اندازه گیزی رانش به کار میرود در لوله اگزور یا همان JET PIPE یک فشار سنج کار گذاشته شده که فشار را اندازه گیری میکند و هر چه فشار بیشر باشد THRUST بیشتر است.
آلات ENGINE PRESSURE RATIO
هم با فشار کار میکند کارکرد این آلات به گونه ای است که یک فشار سنج در لوله اگزوز به کار گرفته شده که فشار هوا را نسبت به فشار هوای ورودی اندازه میگیرد بنابراین فشار موتور را بدست میآورد .
در هواپیما های ترابری یک آلات وجود دارد بنام TORQUE METER که گشتاور پره ها را حساب میکند.
آلات ACCELEROMETER آلاتی است که با آن فشار G را اندازه میگیرند
آلات TURN AND BANK RATIO میزان گردش را اندازه گیری میکند
ساعت هم از آلات مهم در کابین است
از آلات دیگر میتوان به افق سنج اشاره کرد که با ژیروسکوپ کار میکند و جهت نما هم یا از نوع قطب نما الکترومغناطیسی است و یا ژیروسکوپی ،ژیروسکوپ یک قطعه مشابه چزخ است که حول محور دواری میچرخد و بیشتر وزنش بر روی رینگ آن است و نشان میدهد که چقدر از مسیر منحرف شدید و ژیروسکوپ در خلا کار میکند .
آلات SUCTION برای نشان دادن میزان خلا برای کارکرد درست ژیروسکوپ ها است.
آلات RPM که دور در دقیقه را نشان میدهد دو دو نوع مکانیکی و الکتریکی است