آیا بالها در ایجاد نیروی بالابر کارآمدتر هستند، در مقابل جهت گیری نیروی رانش موتور به سمت پایین؟حفظ نیروی بالابر انرژی را صرف می کند زیرا هوا باید به طور مداوم به سمت پایین شتاب شود. در «مقدار انرژی» هواپیما، این مقدار انرژی به صورت درگ اضافی ناشی از بال ظاهر می شود که باید با رانش اضافی موتور جبران شود.
بنابراین به نظر من قدرت لازم برای نگه داشتن یک هواپیما در ارتفاع ثابت با استفاده از بال دقیقاً برابر با قدرتی است که اگر "به سادگی" به جای بال از یک فن رو به پایین استفاده کنیم، لازم است.
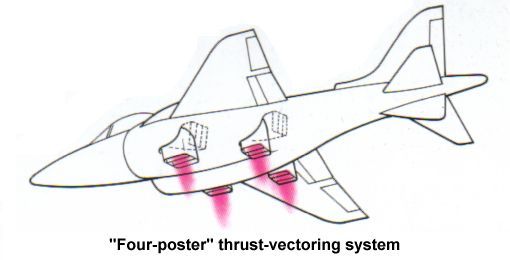
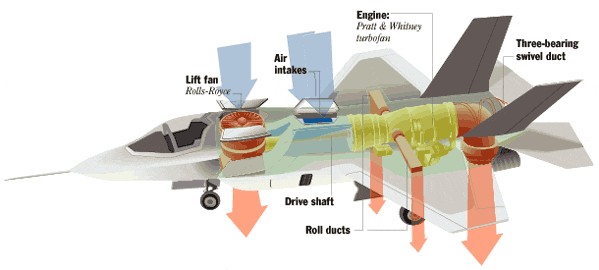
اکنون، برخی از پستها در این وبسایت، هواپیماهای VTOL را با هواپیماهای مسافربری با اندازه مشابه مقایسه میکنند و بیان میکنند که VTOL به نیروی رانش بسیار بیشتری نیاز دارد اما با توجه به استدلال بالا، آیا برای قرار دادن یک هواپیما در هوا، چه با استفاده از بال و چه برای هدایت رانش موتور به سمت پایین، دقیقاً به همان میزان نیرو نیاز نیست؟
لطفاً برای لحظه ای مشکلات فنی و مسائل ایمنی را نادیده بگیرید. آنها در سایر سؤالات مربوط به رانش گیمبال و هواپیمای VTOL مورد بحث قرار می گیرند. سوال من به مصرف انرژی و توان مربوط می شود.
سوال جالبیه صرفاً از نظر تجربی، این نسبت بالابر به درگ است که شما به دنبال آن هستید. اگر این مقدار را همانطور که برای هر هواپیمای خاصی داده شده است در نظر بگیرید، پاسخ مستقیمی خواهید داشت که بالها چقدر موثرتر هستند. این نسبت بالابر به کشش کل است. موتور فقط باید بر کشش غلبه کند.
با L/D برابر با وحدت، شما به همان نیروی رانش نیاز دارید که برای برخاستن عمودی. اما حتی هواپیماهای بال ثابت کاملاً «بد» نیز دارای L/D حدود 5 خواهند بود. گلایدرها یا هواپیماهای مشابهی که با تمرکز قوی بر روی آیرودینامیک ساخته شده اند، می توانند L/D 50 یا بیشتر داشته باشند (حداقل در محدوده محدودی از سرعت های هوایی).
بنابراین بله، بال ها کارآمدتر هستند. حدود یک مرتبه بزرگی به عنوان یک قانون سرانگشتی برای هواپیماهای معمولی و سرعت مطلوب هوا.
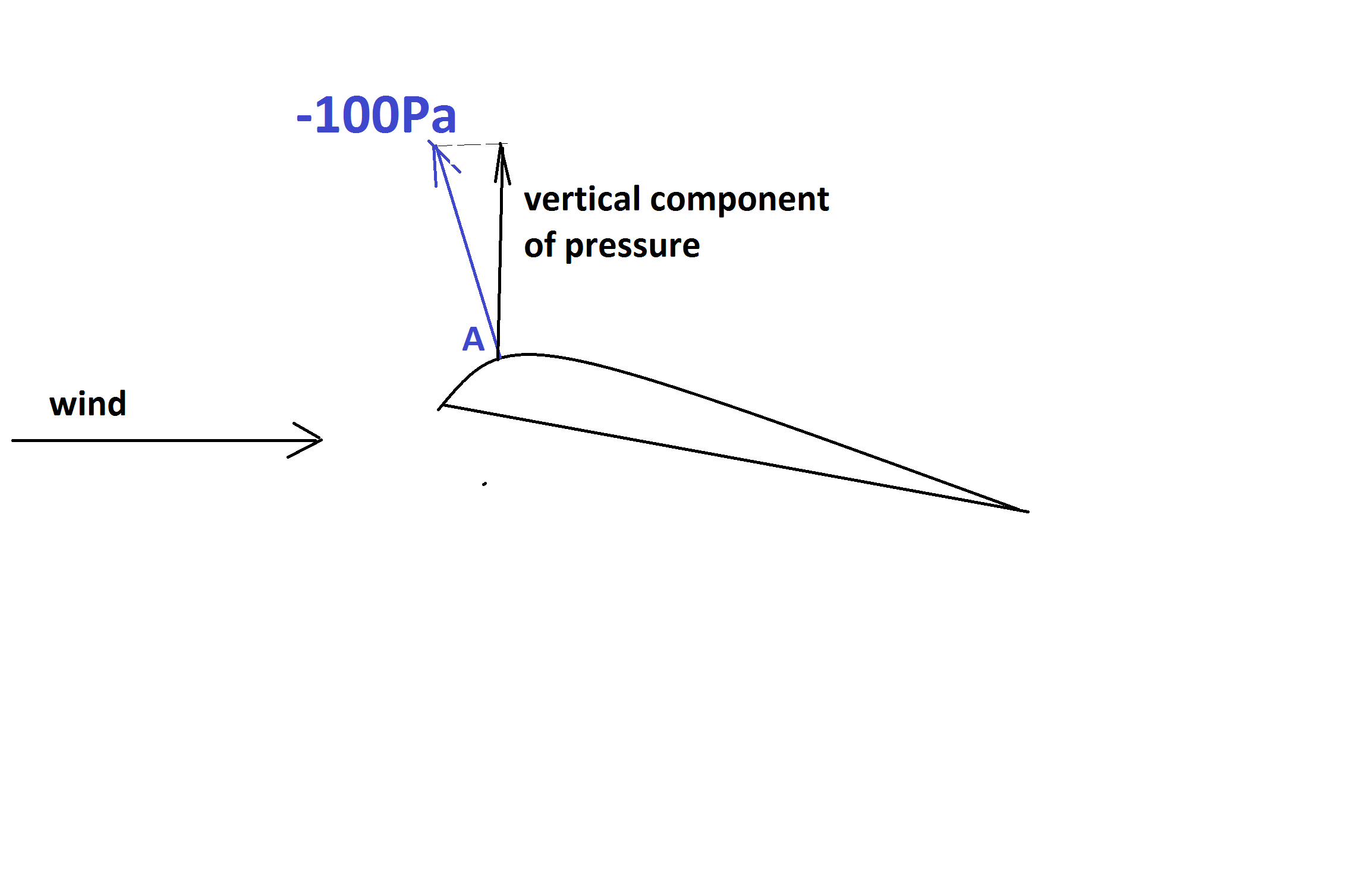
توضیح اینکه چرا استدلال شما با فشار هوا به پایین نادرست است، دشوارتر است. من با این فرض شروع می کنم که با عبور هوا از ایرفویل، سرعت آن نسبت به ایرفویل تغییر نمی کند و فقط جهت آن تغییر می کند. (من می دانم که هوا حداقل به دلیل اصطکاک و غیره کند می شود، اما اینها، حداقل از نظر تئوری، چیزهایی قابل اجتناب هستند که مستقیماً به ایجاد بالابر مربوط نمی شوند. اگر چیزی ذاتاً مرتبط با بالابر باشد که باعث می شود جریان هوا نه تنها جهت، بلکه سرعت را نیز تغییر دهد. ، سپس کسی امیدوارم اینجا مرا تصحیح کند.) تغییر سرعت روی یک ایرفویل
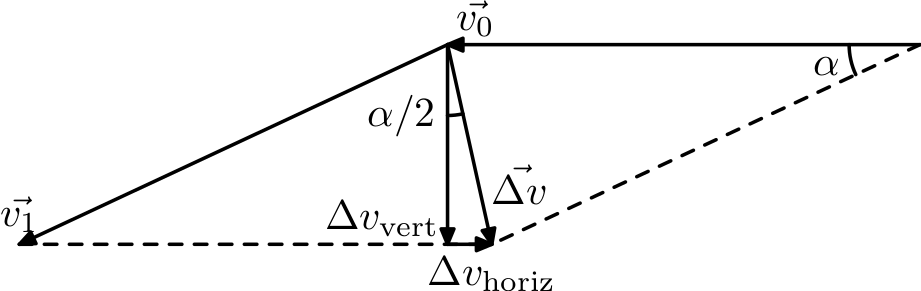
جرم هوا که در ابتدا به سمت ایرفویل با سرعت $\vec{v_0}$ حرکت می کند با زاویه α به سمت پایین منحرف می شود. بنابراین تغییر در سرعت$\vec{\Delta v}$ است. این تغییر را می توان به اجزای افقی و عمودی تقسیم کرد. برای نگه داشتن هواپیما در هوا، جزء عمودی باید معادل وزن هواپیما تقسیم بر نرخ جریان جرمی روی بال باشد. جزء عمودی با افقی توسط مرتبط است
$\Delta v_{\rm horiz}=\Delta v_{\rm vert} \cdot \tan{\alpha\over 2}.$
بنابراین، از این دیدگاه سادهگرایانه، کشش $\tan\alpha/2$ برابر بالابر خواهد بود. نرخ جریان جرمی بالاتر روی بال (بالهای طولانیتر، سرعت هوای بیشتر) حفظ همان بالابر با انحراف کمتر $\alpha$ را ممکن میسازد، بنابراین به دلیل بالابر تولید شده، پسکشی کمتری دارد.
توضیحات تکمیلی:من ارتباط آن با قدرت و انرژی چگونه است
پاسخ بالا بر این متمرکز است که چگونه بال ها نیروی رانش لازم موتور را کاهش می دهند، اما سوال اصلی را می توان از نظر بازده انرژی نیز تفسیر کرد. سعی می کنم نظراتی در مورد این قسمت اضافه کنم.
مثال ساده - موتور موشک: برای هواپیما خیلی معمولی نیست، اما ساده است. موشک بدون توجه به اندازه آن و صرف نظر از اینکه به سمت بالا (و نسبت به هوا ساکن است) یا به سمت جلو (و در هوا حرکت می کند) مقدار یکسانی سوخت را در هر ثانیه مصرف می کند تا یک واحد ترش تولید کند. برای ایجاد نیروی رانش بیشتر باید در هر ثانیه سوخت بیشتری بسوزانید. بنابراین، برای پیشرانه موشک، با کاهش نیروی رانش لازم، به همان نسبت در مصرف سوخت صرفه جویی خواهید کرد.
موتورهای پروانه یا جت پیچیده تر هستند زیرا رانش و مصرف سوخت آنها به حرکت موتور در هوا نیز بستگی دارد. همانطور که دیوید کی در پاسخ خود اشاره کرد، ما می توانیم از تکانه و انرژی جنبشی هوای شتاب گرفته برای بدست آوردن توان مورد نیاز برای واحد رانش استفاده کنیم.
با برخی سادهسازیها، رانش سرعت جریان جرمی از طریق موتور/پایه است که در تغییر سرعت جریان ایجاد میشود. $T = \dot m \cdot (v_{\rm out} - v_{\rm in}) = \dot m \Delta v$توان مورد نیاز برای این کار $P = \dot m \cdot {1\over2}(v_{\rm out}^2 - v_{\rm in}^2)=\dot m\Delta v\cdot(v_{\rm in} + {\Delta v\over 2})$ است. بدین ترتیب
${P\over T}=v_{\rm in} + {\Delta v\over 2}\,.$
همانطور که من گفتم، برای ثابت ماندن موتور در برابر گرانش، نیروی رانش بالاتر در مقایسه با هواپیمای بال ثابت در حال پرواز مورد نیاز است. اگر با افزایش سرعت جریان جرمی از طریق موتور (مانند ساخت روتور هلیکوپتر یا استفاده از موتورهای متعدد) Δv باید برای دستیابی به رانش لازم افزایش یابد. بنابراین شما نه تنها به دلیل افزایش نیروی رانش، بلکه به دلیل افزایش وات در واحد رانش نیز به قدرت بیشتری نیاز دارید. توجه داشته باشید که حتی "تقلب هلیکوپتر" هم خیلی خوب کار نمی کند. برای مطابقت با مصرف انرژی موتوری که به لطف L/D بال، نیروی رانش کمتری تولید می کند، باید P/T را نیز بهبود بخشید – با کاهش Δv، در نتیجه افزایش جریان جرمی (شعاع روتور/ ملخ حتی بیشتر از نسبت به افزایش رانش).
در مورد کاهش P/T به دلیل حرکت در هوا چطور؟ خوب، این به موتور خاص و $\Delta v$ آن بستگی دارد. معمولاً به ترتیب بزرگی مشابه سرعت هوا (یا حتی کمتر) خواهد بود، بنابراین نمیتوانیم $v_{\rm in}$ را در معادله وات بر رانش بالا نادیده بگیریم. زمانی که موتور روی هواپیمای در حال حرکت کار می کند جریمه کارایی وجود دارد. اما باید همچنان ارزش آن را داشته باشد زیرا سود حاصل از بالابر بیشتر است.
یک مثال ساده: ما موتوری داریم که می تواند نیروی رانش کافی برای بلند کردن هواپیما به صورت عمودی تولید کند. می توان با تغییر $\Delta v$ بدون هیچ مشکل عملی یا تغییر در کارایی داخلی آن را مهار کرد. و بیایید فرض کنیم که سرعت جریان جرمی از طریق آن، سطح ثابت S ضرب در چگالی هوا و ضرب در میانگین حسابی سرعت هوای ورودی و خروجی است. برای هواپیمای معلق و موتور ثابت که نیروی رانش برابر با وزن هواپیما تولید می کند، $w$ آن است.
$w=\dot m \Delta v_{\rm hover} = \rho S \Delta v_{\rm hover}^2 / 2\,;\quad \Delta v_{\rm hover}=\sqrt{2 w \over \rho S}$
و بنابراین$P_{\rm hover}=w\cdot \Delta v_{\rm hover}/2=\sqrt{w^3\over 2\rho S}\,.$
همان هواپیمایی که روی بال هایش پرواز می کند فقط به نیروی رانش نیاز دارد.$w\over L/D$ سرعت هوا$v_{\rm air}$ است معادله رانش:${w\over L/D} = \dot m \Delta v_{\rm flight} = \rho S \cdot (v_{\rm air}+{\Delta v_{\rm flight} \over 2}) \cdot \Delta v_{\rm flight}$. بدین ترتیب
$\Delta v_{\rm flight}=\sqrt{{2w\over(L/D)\rho S}+v_{\rm air}^2}-v_{\rm air}$و
$P_{\rm flight}={w\over L/D}\cdot(\sqrt{{w\over 2(L/D)\rho S}+{v_{\rm air}^2\over 4}}+{v_{\rm air}\over 2})\,.$
متأسفانه، من هیچ راهی برای ساده سازی و مقایسه $P_{\rm hover}$و $P_{\rm flight}$نمی بینم تا برخی اعداد مشخص:
هواپیمای سبک، 1 تن، 100 گره،$S = 5\,\rm m^2$و$L/D = 15$و$P_{\rm hover} = 290\,\rm kW$و$P_{\rm flight} = 35\,\rm kW$
هواپیمای سنگین 100 تن، 200 گره، $S = 50\,\rm m^2$و$L/D = 15$و$P_{\rm hover} = 90\,\rm MW$و$P_{\rm flight} = 7\,\rm MW$
بنابراین، بر اساس این سادهسازیها، پرواز با بالهایی با موتور مشابه باید از نظر انرژی نیز کارآمدتر باشد. و علاوه بر این، شما در حال حاضر با استفاده از Power $P_{\rm flight}$ در حال حرکت به جلو هستید. برای موتور عمودی قدرت اضافی برای غلبه بر کشش هوا به دلیل حرکت ضروری است.
موتورها (مثلاً موتورهای پیستونی) بالابر را فراهم نمی کنند. موتورها بال ها را به حرکت در می آورند. هر تیغه پروانه یک بال است. هر بال (در اندازه یکسان، ایرفویل، زاویه حمله، سرعت نسبی، ارتفاع) مقدار یکسانی را فراهم می کند.
هر دو دستگاه زیر یک بالابر را ارائه می دهند، یکی مستقیم به جلو پرواز می کند، دیگری در دایره پرواز می کند. یکی هواپیما و دیگری پروانه است. نشان دادن نیروی رانش موتور به سمت پایین = جهت پرواز پره ها به صورت افقی. امیدوارم این کمک کند.
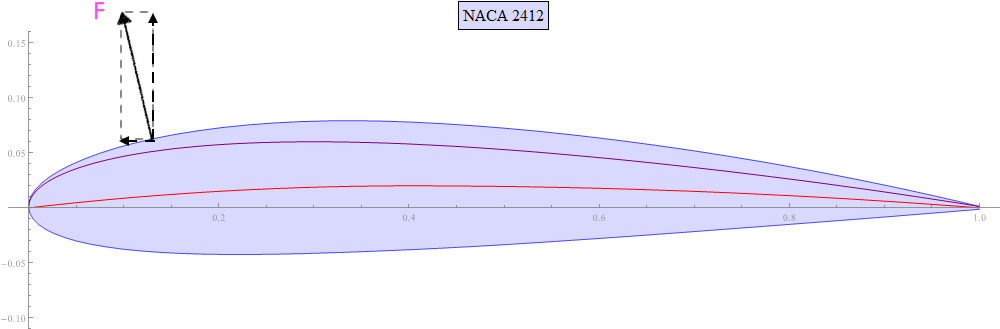
بالابر بال
با توجه به مصرف انرژی و توان، برای مقدار معینی از نیرویی که قرار است با شتاب دادن به یک جرم هوا تولید شود، هنگامی که یک توده هوای کوچک را در هر دوره زمانی شتاب می دهید، نسبت به زمانی که به یک توده هوای بزرگ شتاب می دهید، به نیروی بیشتری نیاز است. این به این دلیل است که نیرو با تغییر تکانه جرم هوا متناسب است، در حالی که نیرو متناسب با تغییر انرژی جنبشی است. و در حالی که تکانه mv است، انرژی جنبشی $\frac12 mv^2.$ است.
موتور هواپیمای معمولی بسته های نسبتاً کوچکی از هوا را گرفته و با سرعت بالا به عقب می راند. یک پروانه بزرگ، یا یک توربوفن بای پس بالا با ورودی بزرگ، بهتر از یک ملخ کوچک یا یک توربوجت با ورودی کوچک است. اما بال یک هواپیمای معمولی در طول هر واحد زمان، یک بسته بسیار بزرگتر از هوا را نسبت به موتورهای آن جذب میکند. هواپیما با هل دادن بال به سمت جلو در هوا، تولید نیروی نسبتاً ناکارآمد توسط موتورهای خود (گرفتن بسته های کوچک هوا از جلوی هواپیما و شتاب دادن سریع آنها به سمت عقب) را به تولید نیرو بسیار کارآمدتر توسط بال های خود تبدیل می کند. (گرفتن بسته های بزرگ هوا از بالای هواپیما و شتاب نسبتاً آهسته به سمت پایین).
صرف چرخاندن موتور معمولی (جت یا پروانه) یک هواپیمای معمولی به سمت پایین، به هواپیما اجازه نمیدهد تا زمانی که هواپیما در حال پرواز عادی است، به اندازه بال هوا به سمت پایین شتاب دهد.
در هلیکوپتر (همچنین به عنوان "هواپیمای بال چرخشی" شناخته می شود) موتور بال را می چرخاند (معروف به روتور)، در نتیجه آن را از طریق هوا فشار می دهد و هوای بالای هواپیما را به سمت پایین شتاب می دهد، چه بدنه از طریق توده هوا به سمت جلو حرکت کند یا نه. بنابراین، یک هلیکوپتر میتواند با یک نیروگاه نسبتاً کوچک به صورت عمودی در مقایسه با آنچه که برای بلند شدن عمودی با موتورهای معمولی هواپیما با بال ثابت نیاز دارید، پرواز کند. اگر روتور هلیکوپتر را به عنوان یک "پنکه رو به پایین" در نظر بگیرید، در واقع به خوبی کار می کند.
با مروری بر پاسخ ها، من یک رویکرد بسیار ساده را برای توضیح تفاوت از دست می دهم:
فهرست کردن ناکارآمدی ها برای هر دو راه حل طراحی
بال ثابت
کشش غیر تولید کننده بالابر - مقداری از درگ مربوط به تولید بالابر نیست، به عنوان مثال. اصطکاک هوا روی سطح بال
گرداب های نوک بال - اختلاف فشار بین بالا و پایین بال به دنبال یکسان شدن با جریان هوا از پایین به بالا است. این را می توان با بال ها و/یا نسبت ابعاد بالای بال کاهش داد.
هر چیزی - این یک مکان نگهدار برای هر چیزی است، ممکن است از دست داده باشم. برای همتای آن به زیر مراجعه کنید.
بال چرخشی
کشش غیر تولید کننده بالابر - مانند نقطه معادل بالا، به جز مشخصات بال های مختلف، ایرفویل و سرعت های هوایی متفاوت. برای اطلاعات بیشتر در مورد سرعت های هوایی مختلف به زیر مراجعه کنید.
گرداب های نوک بال - مانند نقطه معادل بالا، به جز طول بال و بنابراین نسبت ابعاد در انتخاب طراحی محدودتر است. بالها مشکلات ساختاری زیادی ایجاد میکنند و کشش را بیش از حد متناسب افزایش میدهند، زیرا طبق تعریف در نوک (سریع حرکت) هستند.
هر چیزی - اساساً هر چیزی که برای بال های ثابت اعمال می شود برای بال های چرخشی نیز صدق می کند. به علاوه، اغلب اوقات جریان هوای غیر یکنواخت (به زیر مراجعه کنید) اجازه بهینه سازی در مشخصات بال، ایرفویل و غیره را نمی دهد.
توزیع غیر یکنواخت سرعت هوا بر روی تیغه - نوک یک روتور سریعتر از پایه آن در هوا حرکت می کند. بنابراین به سختی می توان سرعت هوای مطلوب را در همه جای پره روتور به طور همزمان به دست آورد.
سرعت های مختلف هوایی برای تیغه های قبلی در مقابل عقب رفتن - سرعت رو به جلو هواپیما به سرعت هوا بر روی تیغه قبلی اضافه می شود اما از عقب نشینی کم می شود. این تفاوت بر مشکل دستیابی به جریان هوای مطلوب می افزاید.
نیاز به گشتاور متقابل - روتور دم در طراحی کلاسیک هلیکوپتر به نیروی موتور اصلی نیاز دارد بدون اینکه به بالابر یا رانش به جلو اضافه شود. این اساساً یک "ضرورت بی فایده" است. طراحیهای روتور دوقلو ممکن است از "جریان هوای مختل" روزافزون رنج ببرند (به زیر مراجعه کنید).
حرکت دایره ای - حرکت دایره ای اساساً به سمت مرکز شتاب می گیرد. "پرواز مستقیم" کارآمدتر خواهد بود، به عنوان مثال. یاتاقان هایی روی روتور وجود دارد که حرکت زاویه ای را از بین می برد. در مقایسه، یک بال ثابت علاوه بر ناکارآمدی های دیگر، حرکت خود را از دست نمی دهد. این همچنین الزامات ساختاری را بر روی پره های روتور ایجاد می کند که ممکن است سایر بهینه سازی های طراحی را محدود کند.
جریان هوای مختل شده - تیغه ای که قبلاً عقب نشینی کرده بود از طریق چرخش قبلی قبلی حرکت می کند. هوای آشفته، جریان هوای تمیزی ایجاد نمی کند. این باعث کاهش نسبت بالابر به درگ می شود.
ایرفویل بهینه نشده - چندین نکته در بالا قبلاً به این موضوع اشاره کرده اند، یا با ضروری ساختن آن (الزامات ساختاری در حرکت دایره ای) یا با جلوگیری از بهینه سازی (توزیع غیریکنواخت سرعت هوا بر روی تیغه).
برای بازگشت به سوال اصلی:
به عنوان یک قاعده کلی، میتوانیم فرض کنیم که هر چه فهرست ناکارآمدیها طولانیتر باشد، کارایی طراحی کمتر است. به خصوص زمانی که همه چیز (و هر چیزی) در یک لیست در لیست دیگر نیز ظاهر می شود. برای اینکه قانون سرانگشتی نقض شود، باید تفاوتهای کیفی زیادی در هر نقطه وجود داشته باشد..I hope I have helped you in understanding the question. Roham Hesami, seventh semester
aerospace engineering


رهام حسامی ترم هفتم مهندسی هوافضا