

سلام به دوستان عزیز
میخواستم در مورد ویژگی های ژیروسکوپ و دلایل وجود این ویژگی ها بحث کنیم . میخوام با فرمول بدست بیاد
ممنون
ژیروسکوپ
ژیروسکوپ
رسول خدا - صلي الله عليه و آله - فرمود: زماني بر مردم خواهد آمد كه صبر نمودن در برابر مسائل دين ـ و عمل به دستورات آن ـ همانند در دست گرفتن آتش گداخته است
---------------------------------------
امام جعفر صادق (ع) : دنيا مانند آب درياست كه هر چه شخص تشنه از آن بيشتر آشامد ، تشنگيش بيشتر شود تا او را بكشد
---------------------------------------
امام جعفر صادق (ع) : دنيا مانند آب درياست كه هر چه شخص تشنه از آن بيشتر آشامد ، تشنگيش بيشتر شود تا او را بكشد


Re: ژیروسکوپ!
سلام...
من نمیدونستم ژیروسکوپ چیه...برای شروع فعالیت یه جستجو کردم و میزارم اینجا تا بقیه دوستانی که مثل من نمیدونن ژیروسکوپ چیه ( البته اسمش به گوششون خورده ) بدونن :
منبع : http://www.irandeserts.com/articles/742.htm

من نمیدونستم ژیروسکوپ چیه...برای شروع فعالیت یه جستجو کردم و میزارم اینجا تا بقیه دوستانی که مثل من نمیدونن ژیروسکوپ چیه ( البته اسمش به گوششون خورده ) بدونن :
اینم دو تا عکس :ژيروسكوپها سنسورهايي مي باشند كه ما از آنها جهت به دست آوردن سرعت زاويه اي و موقعيت زاويه اي استفاده مي كنيم با پردازش اين اطلاعات مي توان موقعيت كلي جسم را نيز بر اساس محاسبات به دست آورد ژيروسكوپ عضو اصلي سيستمهاي هدايت اينرسي مي باشد. سيستم هدايت اينرسي كه در ناوبري اينرسي مورد استفاده قرار مي گيرند سيستمهايي هستند كه جهت مشخص كردن موقعيت يك متحرك مانند وضعيت هوايي يا كشتي با استفاده از متغيير هاي اينرسي آن مثل سرعت و شتاب كه اين امر از طريق اندازه گيري اين كميتها توسط حس كننده اينرسي انجام مي گيرد. در حالت كلي سيستم هدايت اينرسي عبارت است از ژيروسكوپ ها و شتابسنجها كه بر روي پايه ثبات اينرسي نصب مي شوند.
وظيفه اصلي ژيروسكوپ ها ايجاد يك دستگاه مختصات مرجع است و شتاب سنجها شتاب متحرك در امتداد چنين محورهايي اندازه مي گيرند. كه اين شتاب مي تواند نسبت به دستگاه مرجع اينرسي يا دستگاه مرجع ديگري مثل دستگاه متصل به زمين باشد.
منبع : http://www.irandeserts.com/articles/742.htm
تو هم یک روز بزرگ میشی میری تا شهر رویاها
به یاد خونه میافتی چشات میشه مثل دریا
به یاد امشب و هر شب که من ویرون و آواره
نشستم تا سحر بیدار به پای تو و گهواره
به یاد خونه میافتی چشات میشه مثل دریا
به یاد امشب و هر شب که من ویرون و آواره
نشستم تا سحر بیدار به پای تو و گهواره
-
ATI_PENCIL

محل اقامت: کرج
عضویت : سهشنبه ۱۳۸۸/۱۰/۲۲ - ۲۱:۳۹
پست: 384-
سپاس: 18
تماس:
Re: ژیروسکوپ!
ژیروسکوپ یا همون فرفره ی خودمون جسمی است که میتواند آزادانه حول محور تقارن خود بچرخد .
و معمولا دو نوع حرکت رو تشکیل میده : حرکت دورانی و حرکت تقدیمی . اگه ژیروسکوپ حول محور خودش بچرخه حرکت دورانی و اگه حول محور عمود بر سطح بچرخه حرکت تقدیمیه . سرعت زاویه ای آنها را به ترتیب با w (امگا ) ,wp ( امگاp ) نشون میدیم . داریم :
wp = m g b/I w
که در آن b= OG فاصله ی گرانیگاه جسم تا نقطه ی اتکا است . البته ما تو آزمایشگاه b رو به صورت تجربی تعریف کردیم .یک نکته ای که هست اینه که در صورتی که b=0 ، امگا p هم صفر میشه و دیگه حرکت تقدیمی نداریم .
خیلی راحت میشه لختی دورانی و امگا و امگا p رو با اندازه گیری چند طول و دوره ، به دست آورد .
البته من برای شکلی که داخل کتاب آزمایشگاه فیزیک پایه 1 هست جستجو کردم ولی نبود . تقریبا شبیه یک چرخ دوچرخه است که روی پایه ای قرار میگیره و تکیه گاهی هم داره .
و معمولا دو نوع حرکت رو تشکیل میده : حرکت دورانی و حرکت تقدیمی . اگه ژیروسکوپ حول محور خودش بچرخه حرکت دورانی و اگه حول محور عمود بر سطح بچرخه حرکت تقدیمیه . سرعت زاویه ای آنها را به ترتیب با w (امگا ) ,wp ( امگاp ) نشون میدیم . داریم :
wp = m g b/I w
که در آن b= OG فاصله ی گرانیگاه جسم تا نقطه ی اتکا است . البته ما تو آزمایشگاه b رو به صورت تجربی تعریف کردیم .یک نکته ای که هست اینه که در صورتی که b=0 ، امگا p هم صفر میشه و دیگه حرکت تقدیمی نداریم .
خیلی راحت میشه لختی دورانی و امگا و امگا p رو با اندازه گیری چند طول و دوره ، به دست آورد .
البته من برای شکلی که داخل کتاب آزمایشگاه فیزیک پایه 1 هست جستجو کردم ولی نبود . تقریبا شبیه یک چرخ دوچرخه است که روی پایه ای قرار میگیره و تکیه گاهی هم داره .
خروج از سایت محترم هوپا؛ بامداد یکشنبه، بیست و یکم خرداد نود و یک.
-
ATI_PENCIL
محل اقامت: کرج
عضویت : سهشنبه ۱۳۸۸/۱۰/۲۲ - ۲۱:۳۹
پست: 384-
سپاس: 18
تماس:
Re: ژیروسکوپ!
البته این شکل بد نیست : (با کمی تغییر : چون بعد از گذاشتن پست پیداش کردم و گرنه از همون اسامی استفاده میکردم . )
شما دسترسی جهت مشاهده فایل پیوست این پست را ندارید.
خروج از سایت محترم هوپا؛ بامداد یکشنبه، بیست و یکم خرداد نود و یک.
-
ATI_PENCIL
محل اقامت: کرج
عضویت : سهشنبه ۱۳۸۸/۱۰/۲۲ - ۲۱:۳۹
پست: 384-
سپاس: 18
تماس:
Re: ژیروسکوپ!
و ...
شما دسترسی جهت مشاهده فایل پیوست این پست را ندارید.
خروج از سایت محترم هوپا؛ بامداد یکشنبه، بیست و یکم خرداد نود و یک.
-
mahmoudmehraeen
عضویت : یکشنبه ۱۳۸۸/۱۱/۱۸ - ۱۰:۴۸
پست: 2-
Re: ژیروسکوپ!
یک فرفره که با سرعت دور محورش می چرحه این خاصیت راپیدا میکنه که امتداد محورش درفضا مثل قطب نما ثابت میما ند اگر بخواهیم محورش را منحرف کنیم حرکتی گردشی حول ا متدادی که قبلا داشه انجام میدهد لذا از ژیروسکوپ بعنوان جهت یاب استفاده میشود مثل قطب نما منتها در جهتی خودمان ازقبل اتتخاب کرده ایم
-
rohamavation

نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3288-
سپاس: 5494
- جنسیت:
تماس:
Re: ژیروسکوپ!
اصول ژیروسکوپی
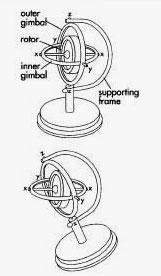
تمام اجسام در حال اسپین خاصیت ژیروسکوپی دارن. ژیروسکوپ ابزاری است متشکل از چرخی که در دو یا سه گیمبال نصب شده است که تکیهگاههای اکسیالی را برای چرخاندن چرخ حول یک اکسیال فراهم میکنه مجموعهای از سه گیمبال که یکی روی دیگری با اکسیالهای اکسیالی متعامد نصب میبشهممکنه استفاده بشه تا به چرخی که روی درونیترین گیمبال نصب شده جهتی مستقل از جهت در فضااز تکیهگاه خود داشته باشه
رفتار ژیروسکوپ را میتوان با در نظر گرفتن چرخ جلوی دوچرخه به راحتی میشه درکش کرد. اگر چرخ از حالت عمودی به سمت چپ متمایل بشه به طوری که بالای چرخ به سمت چپ حرکت کنه لبه جلویی چرخ نیز به سمت چپ میچرخه به عبارت دیگر اسپین بر روی یک اکسیال چرخ گردان باعث اسپین اکسیال سوم میشه
یک ژیروسکوپ رفتارهایی از جمله حرکت تقدیمی و رقص اکسیالی nutation) را نشان میدهد.
${\displaystyle {\boldsymbol {\tau }}={{d\mathbf {L} } \over {dt}}={{d(I{\boldsymbol {\omega }})} \over {dt}}=I{\boldsymbol {\alpha }}}$
که در آن τ,Lبه ترتیب ممنتوم زاویهای و تورک ژیروسکوپI ممان اینرسی بردار ωانگولار ولوسیتیو αاکسلریشن زاویهای آن است. از این رابطه نتیجه میبشه که تورکτ که عمود بر اکسیال اسپین و بنابراین عمود بر L وارد بشه منجر به اسپینی در راستای اکسیالی عمود بر τو Lمیبشه. این حرکت precession نام داره. انگولار ولوسیتیΩP هم توسط ضرب خارجی زیر داده میبشه:
تورک وارد بر ژیروسکوپ از دو منبع تأمین میبشه. نیروی جاذبه که بهطور عمود به سمت پایین بر مرکز جرم وارد میشه و یک نیروی مساوی به طرف بالا که به طرف تکیهگاه وسیله وارد میشه اسپین ناشی از این تورک به سمت پایین نیست تا بهطوریکه احتمال مورد انتظاره وسیله به زمین بخورد در واقع بر آیند اینها عمود بر هر دو تورک جاذبهای (افقی و عمود بر اکسیال اسپین) و اکسیال اسپین (افقی و به سمت بالا از محل تکیه گاه) یعنی یه دور یک اکسیال عمودی خواهد بود که موجب میبشه وسیله به آرامی حول نقطهٔ تکیه گاهش بچرخه. تحت یک اندازهٔ تورک ثابت τ سرعت تغییر جهتΩP به صورت معکوس با L متناسب است و نیز با اندازهٔ ممان زاویهای آن:
${\displaystyle \tau ={\mathit {\Omega }}_{\mathrm {P} }L\sin \theta \!}$
یک مورد ساده از حرکتکه به عنوان تقدم ثابت نیز شناخته میشه می تواند با رابطه زیر با لحظه توصیف بشه:${\displaystyle \sum M_{x}=-I{\phi '}^{2}\sin \theta \cos \theta +I_{z}\phi '\sin \theta (\phi '\cos \theta +\psi ')}$
$\phi$ نشان دهنده تقدم است،$\psi $با اسپین نشان داده میشه $\theta$ زاویه nutation است وI نشان دهنده اینرسی در امتداد اکسیال مربوطه آن است. این رابطه فقط در صورتی معتبر است که تورک در امتداد اکسیالهای Y و Z برابر با 0 باشه.
معادله را می توان با توجه به اینکه سرعت زاویه ای در امتداد اکسیال z برابر است با مجموع تقدم و اسپین کاهش داد:${\displaystyle \omega _{z}=\phi '\cos \theta +\psi '}, Where
$} نشان دهنده سرعت زاویه ای در امتداد اکسیال z است.${\displaystyle \omega _{z}}$
${\displaystyle \sum M_{x}=-I{\psi '}^{2}\sin \theta \cos \theta +I_{z}\psi '(\sin \theta )\omega _{z}}$
${\displaystyle \sum M_{x}=\psi '\sin \theta (I_{z}\omega _{z}-I\psi '\cos \theta )}$
حرکت آن تحت تأثیر اصل تقدم ژیروسکوپی است که این مفهوم است که نیرویی که به یک جسم در حال اسپین وارد میبشه حداکثر واکنش را تقریباً 90 درجه بعد خواهد داشت. واکنش ممکن است از 90 درجه متفاوت باشه زمانی که نیروهای قویتر دیگری در حال بازی هستند.ژیروسکوپ حول یک اکسیال عمودی حرکت میکنه زیرا تورک همیشه افقی و عمود بر L است. اگر ژیروسکوپ در حال اسپین نباشهانگولار مومنتومدر جهت تورک به دست میآورد (L=ΔL L = ΔL)و حول یک اکسیال افقی میچرخد و همانطور که انتظار داریم میفته.ژیروسکوپ حول یک اکسیال عمودی حرکت می کنهزیرا تورک همیشه افقی و عمود بر L است. اگر ژیروسکوپ در حال اسپین نباشهتکانه زاویه ای در جهت تورک محاسبه میشه(L=ΔL) و حول اکسیال افقی میچرخه. همانطور که انتظار داشتیم سقوط کرد.
چه چیزی جهت تقدم ژیروسکوپ را تعیین می کنه؟
دلیل فیزیکی اساسی که پیشروی یک ژیروسکوپ در جهت خاصی هدایت بشه چیست؟
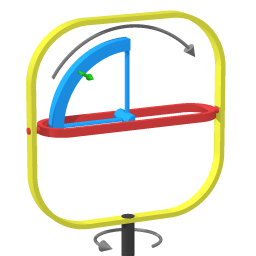
خوبجهت تقدم یک ژیروسکوپ.
تصویر اول یک چرخ ژیروسکوپ نصب شده در گیمبال را نشان می دهد. از بیرون به داخل یک محفظه زرد و یک محفظه قرمز وجود داره.
من سه اکسیال را تعریف می کنم:
اکسیال رول - چرخ ژیروسکوپ حول اکسیال رول میچرخه.
اکسیال گام - حرکت محفظه قرمز. همینطور که می بینم نصب گیمبال تضمین میکنه که اکسیال گام بر اکسیال رول عمود است.
اکسیال اسپینی - حرکت محفظه زرد.
ابتدا وضعیت تقدم یکنواخت را مورد بحث قرار خواهم داد:
چرخ به سرعت میچرخه
مقداری اسپین وجود داره
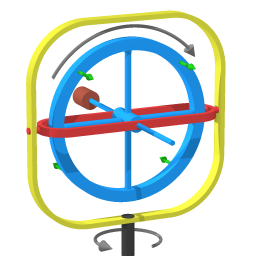
تصویر دوم یک ربع منفرد را نشان می دهد. ایده این است که آن ربع را به عنوان یک موقعیت ثابت نسبت به محفظه قرمز در نظر بگیریمبا بخش هایی از چرخ در حال اسپین در آن ربع حرکت می میکنه
جرمی که از طریق آن ربع حرکت می کنه به سمت اکسیال اسپینی حرکت می میکنه به یک ذره نقطه ای در امتداد لبه چرخ فکر کنیدبه عنوان مثال نقطه ای که فلش سبز رنگ شروع بشه. آن نقطه در حال دور زدن اکسیال اسپین با سرعت متناظر است. با نزدیکتر شدن به اکسیال اسپینیآن نقطه به سمت جلوتر از حرکت اسپینی کلی حرکت میکنه
در دو ربعجرم چرخ در حال حرکت از طریق آن ربع به سمت اکسیال اسپین حرکت می کنهدر دو ربع دیگر از اکسیال اسپین فاصله داره.
فلش های سبز نشان دهنده تمایل برای هر ربع زمانی است که چرخ در حال روتیشن و اسپین است. گرایش های حاصل از چهار ربع با هم به یک اثر تنش اضافه بشه.
(در ضمن با توجه به سرعت اسپین و نرخ تقدممیتوان تمایل مربوط به گام را با ادغام اثر دور چرخ محاسبه کرد.)
دلیل اینکه وزن قهوهای چرخ را پایین نمیآورد این است که ترکیب اسپین و اسپین تمایل به بالا رفتن را ایجاد میکنه که از پایین آمدن وزن قهوهای جلوگیری میکنه
عامل کلیدی حرکت است. در صورتی که چرخ در حال اسپین و اسپین باشه تمایل به زمین زدن همنیطور که با فلش های سبز نشان داده بشه ایجاد بشه. به همین ترتیبهنگامی که اسپین و پیچ وجود دارهحرکت اسپینی شروع بشه.
در یک چرخ ژیروسکوپ در ابتدا فقط در حال اسپین است. سپس یک تورک اضافه بشه. چرخ ژیروسکوپ کمی نسبت به تورک تسلیم بشه حرکت تسلیم شدن در برابر تورک حرکتی است که یک حرکت اسپینی ایجاد می کنهآن حرکت اسپینی با تورک خنثی می کنهبنابراین چرخ بیشتر از این حرکت نمی میکنه در تظاهراتچرخ ژیروسکوپ معمولا آنقدر سریع میچرخه که حرکت شیار به طور نامحسوسی کوچک است.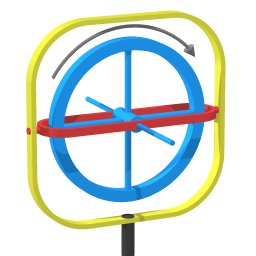
ۀمفاهیمی مانند بردار انگولار مومنتوماسپینی بسیار قدرتمند هستند
اساساً حفظ تکانه زاویه ای است که تعیین می کنه ژیروسکوپ به چه سمتی بچرخه. نکته مهمی که باید متوجه شداین است که تکانه زاویه ای یک کمیت برداری استبا قدر و جهت معینی که در امتداد اکسیال اسپین قرار داره (دوبارهقانون دست راست را اعمال کنم).
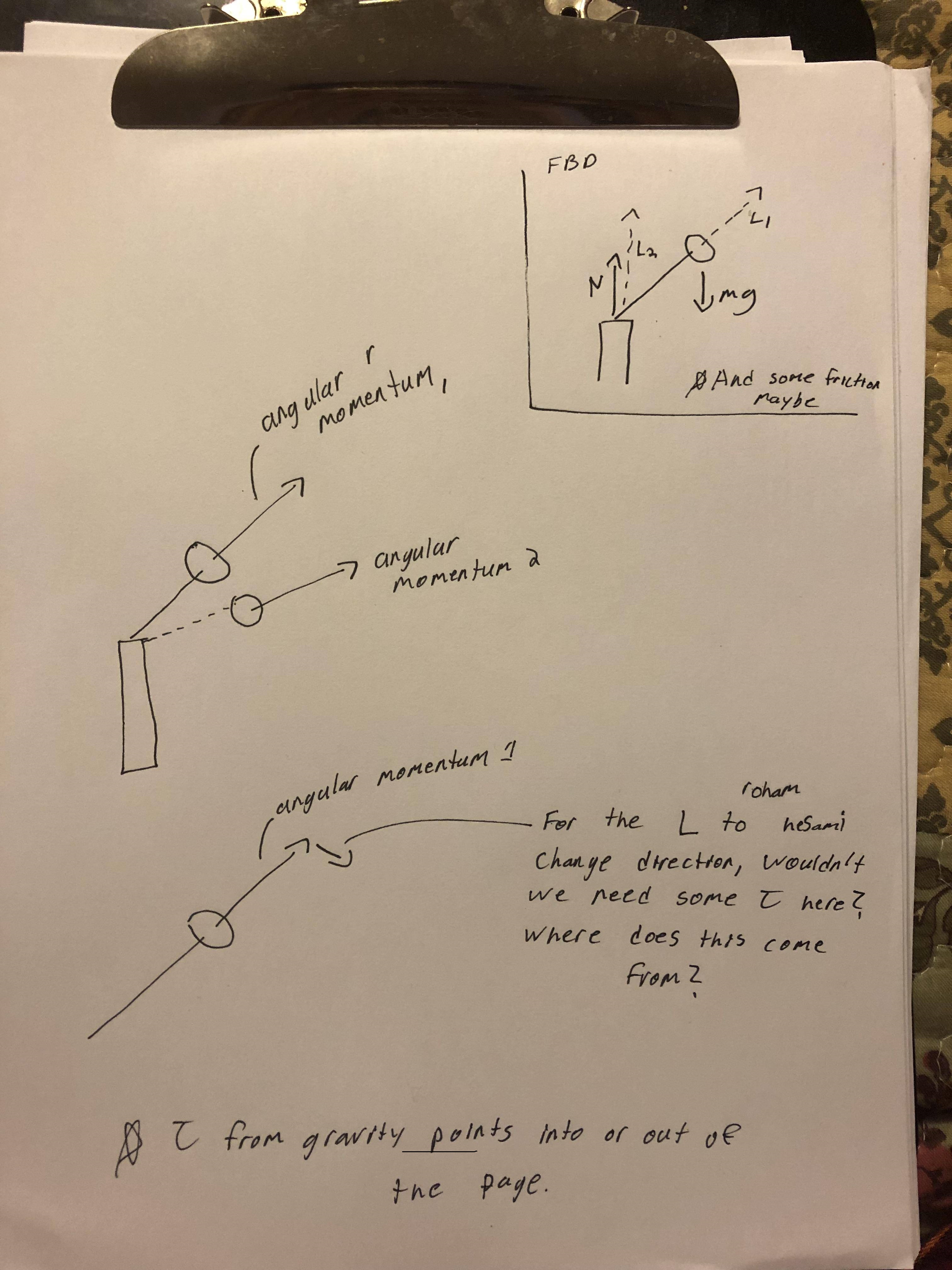
تنها چیزی که در اصل باید حل کنید این است
$\frac{d\vec{L}}{dt}=\vec{r}\times\vec{F}$جایی که$\vec{L}$
تکانه زاویه ای است و$\vec{F}$
نیروی (گرانش) اعمال شده در موقعیت$\vec{r}$ است
.سادهترین مدل ژیروسکوپی که میتوانید با استفاده از این معادله آنالیز کنیددیسکی است که روی یک اکسیال میچرخد که عمود بر یک اکسیال دیگر (و گرانش) در فاصلهای قرار میگیره (البته همه چیز بدون اصطکاک در حال اسپین است).
وقتی ژیروسکوپ را برای چرخاندن از اکسیال اسپین فشار میدهمچه نیرویی احساس میکنم؟
بنابراین این سوال بسیار ساده استبا این حال مواد زیادی در ژیروسکوپ وجود داره
$\vec L=I\vec\omega$
اگر آن را طوری فشار دهید که در جهت دیگری بچرخدω'تکانه زاویه ای االان است:$\vec L'=I\vec\omega'$
فرض میکنم پوک Δt طول کشیدسپس یک تورک اعمال کردم
$\vec\tau = \frac{\vec L'-\vec L}{\Delta t}\rightarrow \frac{d\vec L}{dt}=I\frac{\Delta{\omega}}{\Delta t}$
البته انگشت تکان دهنده من فقط با نیروی$\vec f$ اعمال بشه
در فاصله ای$\vec r$
از اکسیال:$\tau = \vec r \times \vec f = rf\sin{\theta}=I\Delta{\omega}/\Delta t$
بنابراین مقاومت در برابر نیروی من این است:
$\frac{I}{r\sin\theta}\frac{\Delta\omega}{\Delta t}= \frac{I\alpha}{r\sin\theta}$
جایی که $\alpha$
اکسلریشن زاویه ای است.
).
اصول ژیروسکوپی
تمام اجسام در حال اسپین خاصیت ژیروسکوپی دارن. وژیروسکوپ ابزاری است متشکل از چرخی که در دو یا سه گیمبال نصب شده است که تکیهگاههای اکسیالی را برای چرخاندن چرخ حول یک اکسیال فراهم میکنه
در مورد یک ژیروسکوپ با دو گیمبالگیمبال بیرونیکه قاب ژیروسکوپ استبه گونه ای نصب بشه که حول اکسیالی در صفحه خودش که توسط تکیه گاه تعیین بشه
بچرخد. این گیمبال بیرونی یک درجه آزادی اسپینی داره و اکسیال آن هیچ درجه ای نداره. گیمبال دومگیمبال داخلیدر قاب ژیروسکوپ (گیمبال بیرونی) نصب شده است تا حول اکسیالی در صفحه خودش بچرخد که همیشه بر اکسیال اکسیالی قاب ژیروسکوپ (گیمبال بیرونی) عمود است. این گیمبال داخلی دو درجه آزادی اسپینی داره. [/img]
[/img]
اکسیال چرخ چرخان (روتور) اکسیال اسپین را مشخص می میکنه روتور محدود به اسپین حول اکسیالی است که همیشه بر اکسیال گیمبال داخلی عمود است. بنابراین روتور دارای سه درجه آزادی اسپینی و اکسیال آن دارای دو درجه است. روتور به نیروی وارد شده به اکسیال ورودی توسط نیروی واکنش به اکسیال خروجی پاسخ می دهد.:
معادله اساسی که رفتار یک اسپین را توصیف میکنه به صورت زیر است:
${\displaystyle {\boldsymbol {\tau }}={{d\mathbf {L} } \over {dt}}={{d(I{\boldsymbol {\omega }})} \over {dt}}=I{\boldsymbol {\alpha }}}$
که در آن τ,Lبه ترتیب ممنتوم زاویهای و تورک ژیروسکوپI ممان اینرسی بردار ωانگولار ولوسیتیو αاکسلریشن زاویهای آن است. از این رابطه نتیجه میبشه که تورکτ که عمود بر اکسیال اسپین و بنابراین عمود بر L وارد بشه منجر به اسپینی در راستای اکسیالی عمود بر τو Lمیبشه. این حرکت precession نام داره. انگولار ولوسیتیΩP هم توسط ضرب خارجی زیر داده میبشه:
تورک وارد بر ژیروسکوپ از دو منبع تأمین میبشه. نیروی جاذبه که بهطور عمود به سمت پایین بر مرکز جرم وارد میبشه و یک نیروی مساوی به طرف بالا که به طرف تکیهگاه وسیله وارد میبشه.
چگونه یک ژیروسکوپ به اسپین ادامه می دهد؟ [/img]
[/img]
[/img]
حرکت آن تحت تأثیر اصل تقدم ژیروسکوپی است که این مفهوم است که نیرویی که به یک جسم در حال اسپین وارد بشه حداکثر واکنش را تقریباً 90 درجه بعد خواهد داشت. واکنش ممکن است از 90 درجه متفاوت نیروهای قویتر دیگری در حال بازی هستند.ژیروسکوپ حول یک اکسیال عمودی حرکت می کنهزیرا تورک همیشه افقی و عمود بر L است. اگر ژیروسکوپ در حال اسپین نباشهانگولار مومنتومدر جهت تورک به دست میآورد (L=ΔL L = ΔL)و حول یک اکسیال افقی میچرخد و همنینطور که انتظار دارم میفته.ژیروسکوپ حول یک اکسیال عمودی حرکت می کنهزیرا تورک همیشه افقی و عمود بر L است. اگر ژیروسکوپ در حال اسپین نباشهتکانه زاویه ای در جهت تورک محاسبه میشه(L=ΔL) و حول اکسیال افقی میچرخه. همین طور که انتظار داشتم سقوط کرد.
.
اساساً حفظ تکانه زاویه ای است که تعیین می کنه ژیروسکوپ به چه سمتی بچرخد. نکته مهمی که باید متوجه شداین است که تکانه زاویه ای یک کمیت برداری استبا قدر و جهت معینی که در امتداد اکسیال اسپین قرار داره (دوباره قانون دست راست را اعمال کنم).
تنها چیزی که در اصل باید حل کنید این است
$\frac{d\vec{L}}{dt}=\vec{r}\times\vec{F}$جایی که$\vec{L}$
تکانه زاویه ای است و$\vec{F}$
نیروی (گرانش) اعمال شده در موقعیت$\vec{r}$ است
.سادهترین مدل ژیروسکوپی که میتوانید با استفاده از این معادله آنالیز کنم دیسکی است که روی یک اکسیال میچرخد که عمود بر یک اکسیال دیگر (و گرانش) در فاصلهای قرار میگیره (البته همه چیز بدون اصطکاک در حال اسپین است).
هنگامی که اکسیال اسپین ژیروسکوپ دیگر عمودی نیست مرکز جرم دیگر مستقیم بالای نقطه تکیه گاه قرار نمیگیردبنابراین از گرانش یک گیره می گیرید که تمایل داره ژیروسکوپ را واژگون میکنه در پاسخ به تورک اعمال شدهیک حرکت پیشروی شروع بشه.
یخوب مید.ونید ژیروسکوپ وسیله ای جهت حفظ جهت در راستای حفظ تعادل هست که از اصل بقای انگولار مومنتوم استفاده میکنهیک ژیروسکوپ مکانیکی همیشه یک چرخ یا دیسک چرخنده با اکسیال آزاد داره که میتواند در هر جهتی بایستد. بهترین روش تحلیل ریاضیه .اکسیالهای مختصات XYZ را به صورت شکل زیر برای ژیروسکوپ رسم میمیکنم تو این شکل g اکسلریشن گرانش است. نقطه G مرکز جرم دیسک را نشان میدهد. محل تکیهگاه نیز با P نمایش داده میبشه. مبدأ مختصات XYZنقطه P است. بردارهای J ،I و K بردارهای یکه هستند و به ترتیب جهت مثبت اکسیالهای Y ،X و Z رابه من نشون میدند.ابتدا من سرعت زاویه ای دیسک محاسبه کنم $\large\overrightarrow{\omega_w}=(\omega_s\sin\theta)\hat{J}+(\omega_s\cos\theta+\omega_p)\hat{K} $ از رابطه مشتق بگیرم $ \large\overrightarrow{a_w}=\frac{d[(\omega_s\sin\theta)\hat{J}]}{dt}+\frac{d[(\omega_s\cos\theta\:+\omega_p)\hat{K}]}{dt}$ خوب $\omega_s $ معلوم هست که صفر هست لذا رابطه ساده میشه$\large\overrightarrow{a}_w=-\omega_s\omega_p\sin\theta\:\hat{I} $ خوب سرعت زاویه ای میله $\large\overrightarrow{\omega}_r=\omega_p\:\hat{K} $ وچون انگولار ولوسیتی میله ثابت است و جهت آن هم تغییر نمیکنه اکسلریشن زاویهای آن صفر هست حالا نیروها و تورکهای وارد به دیسک را برسی میکنم تورک در نقطه G و در راستای اکسیال x را با Mx نشان دادهایم. تورکهای My و Mz نیز به طریقی مشابه تعریف میشه.با قانون دوم نیوتن اشنا هستید همون رابطه معروف $\large\sum_{}F_X=F_{GX}=m_wa_{GX}\\~\\
\large\sum_{}F_Y=F_{GY}=m_wa_{GY}\\~\\
\large\sum_{}F_Z=F_{GZ}-m_wg=m_wa_{GZ} $جرم دیسک با mw نمایش داده شده است. aGX اکسلریشن را در نقطه G و در راستای X نشان میدهم. اکسلریشنهای aGY و aGZ نیز به طوری مشابه و به ترتیب در جهتهای Y و Z تعریف میشه/$\large F_{GY}=m_wa_{GY} $خوب نقطه G روی یک مسیر افقی به شکل دایره و با سرعت ثابت حرکت میکنه پس اکسلریشن ممان اینرسی برابر صفر است.خوب اکسلریشن گرا در جهت y $ \large a_{GY}=-{\omega_p}^2(L\sin\theta)$ هستش.لذا نیرو $ \large F_{GY}=-m_w{\omega_p}^2(L\sin\theta)$ خوب نقطه G با سرعت ثابت روی یک دایره افقی حرکت میکنه اکسلریشن در راستای Z برابر با صفر است پس $\large F_{GZ}-m_wg=m_wa_{GZ}=0 $ و $ \large F_{GZ}=-m_w\:g$ حرکت اویلر را در جهت x برای جسم صلب به کاربرده و . این معادلات در دو جهت دیگر مساوی صفر هستند.$ \large \sum M_{Gx}=I_{Gx}\alpha_x-(I_{Gy}-I_{Gz})\omega_y\omega_z$ ببینید که نیروهای FGX ،FGY وFGZ حول نقطه G هیچ تورکی ایجاد نمیکنند. زیرا هر سه نیرو از نقطه G عبور کرده و طول بازوی تورک در آنها صفر است. در رابطه بالاIGx ،IGy و IGzبه ترتیب ممانهای اینرسی را حول نقطه G در جهتهای y ،x و z نشان میدهد $ \large I_{Gx}=I_{Gz}=\frac{1}{4}m_wr^2$ لذا $ \large I_{Gy}=\frac{1}{2}m_wr^2$معادله حرکت اویلر در جهت x به دست خواهد آمد $ \large M_x=-\frac{1}{4}m_wr^2\omega_s\omega_p\sin\theta-\frac{1}{4}m_wr^2(\omega_s+\omega_p\cos\theta)\omega_p\sin\theta$ در این بخش تورکهای وارد شده به میله را حول نقطه P بررسی کنم $ \large \sum M_{Px}=I_{Px}a_x-(I_{Py}-I_{Pz})\omega_y\omega_z$سرعت و اکسلریشن زاویهای میله در دستگاه xyz را میتونم به صورت زیربیارم $ \large \omega_x=0\:\:,\:\:\omega_y=\omega_p\cos\theta\:\:,\:\:\omega_z=\omega_p\sin\theta\\~\\
\large a_x=a_y=a_z=0$ ،که IPy و IPzبه ترتیب ممانهای اینرسی میله را حول نقطه P در جهتهای y ،x و z نشون میدهند$\large I_{Px}=I_{Pz}=\frac{1}{3}m_rL^2\\~\\
\large I_{Py}=0 $ من معادله اویلر در جهت اکسیال x مینویسم $ \large -m_rg\frac{L}{2}\sin\theta-F_{GZ}L\sin\theta+F_{GY}L\cos\theta-M_x\\
\large=\frac{1}{3}m_rL^2{\omega_p}^2\cos\theta\sin\theta$ ساده شده عبارت $\large {\omega_p}^2\cos\theta(\frac{1}{3}m_rL^2-\frac{1}{4}m_wr^2+m_wL^2)\\
\large=\frac{1}{2}m_wr^2\omega_s\omega_p-m_rg\frac{L}{2}-m_wgL $ هست پایداری ژیروسکوپ انگولار مومنتومتغییرات بردار انگولار مومنتومجسم صلب در بازه زمانی ti تاtf به صورت زیر محاسبه بشه. پارامتر Hf بردار انگولار مومنتومرا در لحظه نهایی tf نشان میدهد. بردار انگولار مومنتومدر لحظه اولیه ti نیز برابر با Hi است. بردار M همکه بیانگر تورکهای خارجی وارد به جسم صلب است.$ \large \sum \int_{ti}^{tf}\overrightarrow{M}dt={\overrightarrow{H}}_f-{\overrightarrow{H}}_i$[
انگولار مومنتومبین زمانهای ti و tf با ΔH نشان داده شده است. خوب تحلیل اسپین میخواهم رابطهای برای ارتباط بین زاویه θ و بردارهای HG و ωs پیدا کنم. با استفاده از ضرب داخلیرابطه زیر به راحتی به دست میاد$ \large \cos\theta=\frac{{\overrightarrow{H}}_G.\hat{J}}{|{\overrightarrow{H}}_G|}$ خوب مشتق بگیرم $ \large\frac{\text{d}\theta}{\text{d}t}=-\frac{{\overrightarrow{H}}_G}{\sin\theta\:|{\overrightarrow{H}}_G|}(\frac{\text{d}\hat{j}}{\text{d}t})$ عبارت زیر جایگذاری کنم $(\frac{\text{d}\hat{j}}{\text{d}t})=\overrightarrow{\omega}\times\hat{j} $ از مفهوم ضرب خارجی $ \large\frac{\text{d}\theta}{\text{d}t}=-\frac{(I_z-I_x)\omega_z\omega_x}{\sin\theta\:|{\overrightarrow{H}}_G|}$ هنگامی که مقادیر Ix وIz با یکدیگر برابر باشند $\frac{\text{d}\theta}{\text{d}t} $ نیز صفر هست $\omega_x=\frac{\text{d}\theta}{\text{d}t}=0 $ و ωp را برحسب یکدیگر محاسبه میکنم. از آنجایی که زاویه θ همیشه ثابت استانگولار مومنتومرا میتوان به صورت زیر و در دستگاه مختصات xyz بیان کرد.$ \large {\overrightarrow{H}}_G=(|{\overrightarrow{H}_G}|\cos\theta)\hat{j}+(|{\overrightarrow{H}_G}|\sin\theta)\hat{k}$ لذا خوب دارم $\large\omega_s=\omega_p\cos\theta\frac{I_w-I_{Gy}}{I_{Gy}} $]حالا چرا هنگام چرخاندن یک فرفره به حالت ایستاده بربرمیگرده
جای این که مانند برخی از بالای صفحه ها به یک نقطه تیز در پایین برسد یک پایین گرد داره. این اثر در تاپ هایی که شعاع انحنای بیشتری در پایین دارن بارزتر و چشمگیرتر است مانند حالت فوقانی بالای تیپ که دارای شعاع انحنای آنقدر بزرگ است که امکان داره مرکز جرم بالای آن باشه در ارتفاعی کوچکتر از شعاع انحنا. در واقع مقاله هایی که من دیده ام نشون میده که چگونه اصطکاک کشویی باعث بالا آمدن مرکز جرم یک تاپ بشه به طور خاص آنالیز بالای تاپ را انجام میدن
تجزیه و تحلیل یک بالا به طور کلی از جمله اثرات اصطکاک کاملاً پیچیدیه. برای ساده کردن تجزیه و تحلیل بسیار زیاده من فقط در یک لحظه به بالا نگاه میکنم که در آن بالا هیچ حرکت خطی نداره و یک انگولار موشنبسیار بزرگ داره که دقیقاً در امتداد اکسیال تقارن بالا قرار داره.
همچنین گرانش را در این توضیح ساده قابل چشم پوشی میدونم. گرانش باعث ایجاد یک تورک کاملاً افقی در قسمت بالایی بشه من فقط به تورک علاقه مند هستیم که دارای یک مولفه عمودی باشه که باعث بشه تا بالا به طور قائم تر بشه. در حقیقت اگر جاذبه سطح و میز را به هم نمیچسبونه هیچ اصطکاک لغزشی در نقطه تمنس بین این دو وجود نداره اما من به راحتی تصور خواهم کرد که اصطکاک کشویی وجود داره بدون در نظر گرفتن چگونگی اصطکاک کشویی مربوط به گرانشه
از آنجا که بالای آن به جای پایین نوک تیز یک گرد داره نقطه تماس بالای آن در P نیست بلکه در بعضی از نقاط C است. از فرضیات گفته شده در بالا در لحظه مورد علاقه P ثابت است. در مقابل از جهت$ \vec{L}$ در C سطح بالا به سمت بیننده در حال حرکت است مستقیم از صفحه نمودار به سمت بالا. اصطکاک کشویی یک نیروی$ \vec{F}_k$ (نشان داده نشده) در بالا در C در جهت مخالف حرکت بالا در آن نقطه است یعنی مستقیما به سمت پایین
بردار موقعیت C از$\vec{X}_C $ است. نیروی $\vec{F}_k $ در بالا یک تورک در قسمت بالای مرکز جرم بالای آن تولید میکنه
$\vec{\tau} = \vec{X}_C \times \vec{F}_k \,\, . $
تورک $\vec{\tau} $ را میتونم اینطور بگم $ \vec{\tau}=\vec{\tau}_{\parallel}+\vec{\tau}_{\perp} \,\, ,$
جایی که$ \vec{\tau}_{\parallel}$ موازی$\vec{L} $ است و$ \vec{\tau}_{\perp}$ عمود بر $\vec{L} $ است.
تورک $ \vec{\tau}$ این است که انگولار موشن$\vec{L} $ با زمان تغییر میکنه ،$\frac{d\vec{L}}{dt} = \vec{\tau}=\vec{\tau}_{\parallel}+\vec{\tau}_{\perp} \,\, . $
اگه$\vec{\tau}_{\parallel} $در جهت مخالف $ \vec{L}$ قرار داره بنابراین اثر$\vec{\tau}_{\parallel} $ کاهش بزرگی $ \vec{L}$ است به عنوان مثال کاهش سرعت بالا.
اگر قسمت بالای آن در فضای خالی باشه اثر $ \vec{\tau}_{\perp}$ چرخاندن قسمت بالای آن در جهت O در جهت ساعت در نمودار خواهد بود. با این وجود به دلیل محدودیتی که قسمت بالای صفحه با جدول در تماس است اثر $\vec{\tau}_{\perp} $ این است که O را از جدول بلند کرده و O را به بالاتر از C نزدیک میکنه
بالا یک بدنه متقارن سفت و سخت است. معادلات حرکت یک جسم صلب در اطراف مرکز جرم آن توسط: .
$I_1\dot\Omega_1=(I_2-I_3)\Omega_2\Omega_3 $
$ I_2\dot\Omega_2=(I_3-I_1)\Omega_3\Omega_1$
$ I_3\dot\Omega_3=(I_1-I_2)\Omega_1\Omega_2$
فرض کنید که بالای سفت و سخت در مورد یک اکسیال متقارن است (بگذارید بگوییم اکسیال سوم) بنابراین من دارم:
$I_1=I_2 $
و همچنین اینکه اکسیال سوم باریک است:$I_3<I_1(or I_2) $
در این حالت معادله سوم حرکت دلالت داره$ \Omega_3=\Omega = const.$
و به جای دو معادله دیگر محاسبه میکنم
$I_1\dot\Omega_1=(I_2-I_3)\Omega\Omega_2 $
$I_2\dot\Omega_2=(I_3-I_1)\Omega\Omega_1 $
با استفاده از مشتق اول معادله دوم با توجه به زمان و جایگزینی معادله دوم به دست می آوریم:$I_1I_2\ddot\Omega_2= \Omega^2 (I_3-I_1)(I_2-I_3)\Omega_2 $
این یک معادله یک نوسان ساز هارمونیک است:$ \ddot\Omega_2+k^2 \Omega_2 = 0$با$ k^2= - \frac{\Omega^2 (I_3-I_1)(I_2-I_3)}{I_1I_2}$
االان مشاهده کنید که k ^ 2> 0$ $از آنجا که $I_3-I_1<0 $ و$I_2-I_3>0 $ بنابراین ثابت فنر واقعی است و نوسان ساز هارمونیک پایدار است.
این اثر ژیروسکوپی نامیده بشه و بیان میکنه که شیئی که در حال اسپین است دارای یک انگولار موشناست $ \vec{L}$ بنابراین تمایل داره که اکسیال اسپین خود باقی بمونند ،$\vec{L}=I\omega $ سریعتر میچرخه (ω بیشتر) بیشتر تمایل داره که اکسیال اسپین خود باقی بمونند.
یک اسپین با سرعت زاویه ای ω میچرخه بنابراین دارای یک حرکت زاویه ای$\vec{L} $ است سریعتر$ \vec{L}$ بیشتر میچرخه و بیشتر تمایل داره که حرکت اسپینی خود را در مورد یک اکسیال خاص حفظ کنه توجه دارم که وقتی سرعت آن کاهش مییابه (به دلیل نیروهای اصطکاک)$ \vec{L}$ کمتری داره بنابراین ترجیح آن به دلیل سنگین شدن آن به سمت پایین افزایش مییابه
میدونمکه نیروی گرانش باعث اسپین بالای اسپین ماشینی (پیش از اسپین اسپینی آن بشه) بنابراین میدونم از این مشاهده نتیجه بگیرم که برای تغییر اکسیال اسپین اسپین باید نیرویی اعمال بشه بیشترین نیرویی که بیشتر از قبل از آن استفاده خواهد کرد اکسیال اسپین (با فرض ثابت بودن L⃗). وقتی این نیرو برداشته بشه به دلیل داشتن اکسلریشن زاویه ای به طور طبیعی و بدون هیچ گونه مقدماتی به حالت اولیه برمیگرده
به عنوان قانون اول نیوتون فکر کنید من به جای حرکت انتقالی در حرکت اسپینی است.قانون اول نیوتون اظهار داشت:جسمی که در حال حرکت است تمایل داره که در حرکت بمونند و در یک خط مستقیم حرکت کنه مگر اینکه توسط یک نیروی نامتعادل عمل میکنه من میدونم قانون را برای حرکت اسپینی دوباره ایجاد کنم جسمی که در حال اسپین است تمایل داره که حرکات اسپینی در مورد یک اکسیال خاص باقی بمونند مگر اینکه توسط یک نیروی نامتعادل عمل میکنه
جسمی که دارای یک حرکت انتقالی با سرعت v باشه به نیروی $ \vec{F}$ نیاز داره تا جهت حرکت خود را به طور مشابه تغییر دهد شیئی که دارای سرعت زاویه ای ω است برای تغییر اکسیال اسپینی خود به نیرو احتیاج داره.تورک به عنوان گرایش نیرو برای اسپین یک جسم در مورد یک اکسیال و از نظر ریاضی به عنوان یک حاصل بردار (ضربدری) از فاصله و نیرو تعریف بشه:$ \vec{\tau}=\vec{r}\times\vec{F}$جایی که r فاصله ای از نقطه اسپین است و$\vec{F} $ به آن نیرو وارد بشه.
میدونمکه تورک یک بردار است و این بردار در در این پیج اوردم
اسپین بالا تقریباً عمودی بشه زیرا دارای انگولار موشن هست و این بدان معناست که اگر جسمی بچرخد در مقابل اکسیال اسپین خود مقدمه گرفته و سریعتر بچرخد در مقابل این مقدمه مقاومت میکنه تا اتفاق بیفتد بنابراین اگر هنوز آن را برعکس کردم میچرخه با همون سرعت زاویه ای به سرعت صفر باز میگرده سریعتر میچرخه سریعتر به حالت اولیه خود باز میگرده.
برای توضیح این موضوع از نظر ریاضی یک در حال اسپین روی زمین با سرعت زاویه ای ω در نظر گرفتم و دارای سرعت زاویه ای شیب ω پی و زاویه شیب دار
انگولار موشن به صورت زیر تعریف بشه:$\vec{L}= \vec{\omega} I $
بگویید اسپین بالای Δθ چرخانده و تغییر آن در انگولار موشنΔL است.
سپس میدونمΔθ را به صورت زیر بیان کنم$ \Delta \theta \approx \frac{\Delta L}{L sin(\phi)}$
سرعت زاویه ای حق تقدم را میتونم به اینطور بگم:$\omega_p = \frac{\Delta \theta}{\Delta t} $
االان میدونم معادله اول را در این معادله جایگزین میکنم.$\omega_p = \frac{\Delta L}{\Delta t L sin(\phi)} $
تورک به عنوان تغییر در انگولار موشن تعریف بشه:
$\frac{\Delta L}{\Delta t}= I \vec{\alpha} = \tau $
حالا این را در معادله قبلی جایگزین میکنم:$\omega_p = \frac{\tau}{L sin(\phi)} $
و فرمول زیر را دریافت میکنم:$\omega_p = \frac{\vec{F}r}{L sin(\phi)} $
از این معادله میتونم بفهمم که اگر نیرویی را روی جسمی در حال اسپین وارد میکنم ωp آن افزایش پیدا میکنه زیرا با نیروی اعمال شده متناسب است. اگر نیروی اعمال شده صفر باشه ωp نیز صفر بشه بنابراین دیگر سرعت زاویه ای فوق العاده ای نخواهد داشت بنابراین دوباره به صورت ایستاده ایستاده است.
تمام اجسام در حال اسپین خاصیت ژیروسکوپی دارن. ژیروسکوپ ابزاری است متشکل از چرخی که در دو یا سه گیمبال نصب شده است که تکیهگاههای اکسیالی را برای چرخاندن چرخ حول یک اکسیال فراهم میکنه مجموعهای از سه گیمبال که یکی روی دیگری با اکسیالهای اکسیالی متعامد نصب میبشهممکنه استفاده بشه تا به چرخی که روی درونیترین گیمبال نصب شده جهتی مستقل از جهت در فضااز تکیهگاه خود داشته باشه
رفتار ژیروسکوپ را میتوان با در نظر گرفتن چرخ جلوی دوچرخه به راحتی میشه درکش کرد. اگر چرخ از حالت عمودی به سمت چپ متمایل بشه به طوری که بالای چرخ به سمت چپ حرکت کنه لبه جلویی چرخ نیز به سمت چپ میچرخه به عبارت دیگر اسپین بر روی یک اکسیال چرخ گردان باعث اسپین اکسیال سوم میشه
یک ژیروسکوپ رفتارهایی از جمله حرکت تقدیمی و رقص اکسیالی nutation) را نشان میدهد.
${\displaystyle {\boldsymbol {\tau }}={{d\mathbf {L} } \over {dt}}={{d(I{\boldsymbol {\omega }})} \over {dt}}=I{\boldsymbol {\alpha }}}$
که در آن τ,Lبه ترتیب ممنتوم زاویهای و تورک ژیروسکوپI ممان اینرسی بردار ωانگولار ولوسیتیو αاکسلریشن زاویهای آن است. از این رابطه نتیجه میبشه که تورکτ که عمود بر اکسیال اسپین و بنابراین عمود بر L وارد بشه منجر به اسپینی در راستای اکسیالی عمود بر τو Lمیبشه. این حرکت precession نام داره. انگولار ولوسیتیΩP هم توسط ضرب خارجی زیر داده میبشه:
تورک وارد بر ژیروسکوپ از دو منبع تأمین میبشه. نیروی جاذبه که بهطور عمود به سمت پایین بر مرکز جرم وارد میشه و یک نیروی مساوی به طرف بالا که به طرف تکیهگاه وسیله وارد میشه اسپین ناشی از این تورک به سمت پایین نیست تا بهطوریکه احتمال مورد انتظاره وسیله به زمین بخورد در واقع بر آیند اینها عمود بر هر دو تورک جاذبهای (افقی و عمود بر اکسیال اسپین) و اکسیال اسپین (افقی و به سمت بالا از محل تکیه گاه) یعنی یه دور یک اکسیال عمودی خواهد بود که موجب میبشه وسیله به آرامی حول نقطهٔ تکیه گاهش بچرخه. تحت یک اندازهٔ تورک ثابت τ سرعت تغییر جهتΩP به صورت معکوس با L متناسب است و نیز با اندازهٔ ممان زاویهای آن:
${\displaystyle \tau ={\mathit {\Omega }}_{\mathrm {P} }L\sin \theta \!}$
یک مورد ساده از حرکتکه به عنوان تقدم ثابت نیز شناخته میشه می تواند با رابطه زیر با لحظه توصیف بشه:${\displaystyle \sum M_{x}=-I{\phi '}^{2}\sin \theta \cos \theta +I_{z}\phi '\sin \theta (\phi '\cos \theta +\psi ')}$
$\phi$ نشان دهنده تقدم است،$\psi $با اسپین نشان داده میشه $\theta$ زاویه nutation است وI نشان دهنده اینرسی در امتداد اکسیال مربوطه آن است. این رابطه فقط در صورتی معتبر است که تورک در امتداد اکسیالهای Y و Z برابر با 0 باشه.
معادله را می توان با توجه به اینکه سرعت زاویه ای در امتداد اکسیال z برابر است با مجموع تقدم و اسپین کاهش داد:${\displaystyle \omega _{z}=\phi '\cos \theta +\psi '}, Where
$} نشان دهنده سرعت زاویه ای در امتداد اکسیال z است.${\displaystyle \omega _{z}}$
${\displaystyle \sum M_{x}=-I{\psi '}^{2}\sin \theta \cos \theta +I_{z}\psi '(\sin \theta )\omega _{z}}$
${\displaystyle \sum M_{x}=\psi '\sin \theta (I_{z}\omega _{z}-I\psi '\cos \theta )}$
حرکت آن تحت تأثیر اصل تقدم ژیروسکوپی است که این مفهوم است که نیرویی که به یک جسم در حال اسپین وارد میبشه حداکثر واکنش را تقریباً 90 درجه بعد خواهد داشت. واکنش ممکن است از 90 درجه متفاوت باشه زمانی که نیروهای قویتر دیگری در حال بازی هستند.ژیروسکوپ حول یک اکسیال عمودی حرکت میکنه زیرا تورک همیشه افقی و عمود بر L است. اگر ژیروسکوپ در حال اسپین نباشهانگولار مومنتومدر جهت تورک به دست میآورد (L=ΔL L = ΔL)و حول یک اکسیال افقی میچرخد و همانطور که انتظار داریم میفته.ژیروسکوپ حول یک اکسیال عمودی حرکت می کنهزیرا تورک همیشه افقی و عمود بر L است. اگر ژیروسکوپ در حال اسپین نباشهتکانه زاویه ای در جهت تورک محاسبه میشه(L=ΔL) و حول اکسیال افقی میچرخه. همانطور که انتظار داشتیم سقوط کرد.
چه چیزی جهت تقدم ژیروسکوپ را تعیین می کنه؟
دلیل فیزیکی اساسی که پیشروی یک ژیروسکوپ در جهت خاصی هدایت بشه چیست؟
خوبجهت تقدم یک ژیروسکوپ.
تصویر اول یک چرخ ژیروسکوپ نصب شده در گیمبال را نشان می دهد. از بیرون به داخل یک محفظه زرد و یک محفظه قرمز وجود داره.
من سه اکسیال را تعریف می کنم:
اکسیال رول - چرخ ژیروسکوپ حول اکسیال رول میچرخه.
اکسیال گام - حرکت محفظه قرمز. همینطور که می بینم نصب گیمبال تضمین میکنه که اکسیال گام بر اکسیال رول عمود است.
اکسیال اسپینی - حرکت محفظه زرد.
ابتدا وضعیت تقدم یکنواخت را مورد بحث قرار خواهم داد:
چرخ به سرعت میچرخه
مقداری اسپین وجود داره
تصویر دوم یک ربع منفرد را نشان می دهد. ایده این است که آن ربع را به عنوان یک موقعیت ثابت نسبت به محفظه قرمز در نظر بگیریمبا بخش هایی از چرخ در حال اسپین در آن ربع حرکت می میکنه
جرمی که از طریق آن ربع حرکت می کنه به سمت اکسیال اسپینی حرکت می میکنه به یک ذره نقطه ای در امتداد لبه چرخ فکر کنیدبه عنوان مثال نقطه ای که فلش سبز رنگ شروع بشه. آن نقطه در حال دور زدن اکسیال اسپین با سرعت متناظر است. با نزدیکتر شدن به اکسیال اسپینیآن نقطه به سمت جلوتر از حرکت اسپینی کلی حرکت میکنه
در دو ربعجرم چرخ در حال حرکت از طریق آن ربع به سمت اکسیال اسپین حرکت می کنهدر دو ربع دیگر از اکسیال اسپین فاصله داره.
فلش های سبز نشان دهنده تمایل برای هر ربع زمانی است که چرخ در حال روتیشن و اسپین است. گرایش های حاصل از چهار ربع با هم به یک اثر تنش اضافه بشه.
(در ضمن با توجه به سرعت اسپین و نرخ تقدممیتوان تمایل مربوط به گام را با ادغام اثر دور چرخ محاسبه کرد.)
دلیل اینکه وزن قهوهای چرخ را پایین نمیآورد این است که ترکیب اسپین و اسپین تمایل به بالا رفتن را ایجاد میکنه که از پایین آمدن وزن قهوهای جلوگیری میکنه
عامل کلیدی حرکت است. در صورتی که چرخ در حال اسپین و اسپین باشه تمایل به زمین زدن همنیطور که با فلش های سبز نشان داده بشه ایجاد بشه. به همین ترتیبهنگامی که اسپین و پیچ وجود دارهحرکت اسپینی شروع بشه.
در یک چرخ ژیروسکوپ در ابتدا فقط در حال اسپین است. سپس یک تورک اضافه بشه. چرخ ژیروسکوپ کمی نسبت به تورک تسلیم بشه حرکت تسلیم شدن در برابر تورک حرکتی است که یک حرکت اسپینی ایجاد می کنهآن حرکت اسپینی با تورک خنثی می کنهبنابراین چرخ بیشتر از این حرکت نمی میکنه در تظاهراتچرخ ژیروسکوپ معمولا آنقدر سریع میچرخه که حرکت شیار به طور نامحسوسی کوچک است.
ۀمفاهیمی مانند بردار انگولار مومنتوماسپینی بسیار قدرتمند هستند
اساساً حفظ تکانه زاویه ای است که تعیین می کنه ژیروسکوپ به چه سمتی بچرخه. نکته مهمی که باید متوجه شداین است که تکانه زاویه ای یک کمیت برداری استبا قدر و جهت معینی که در امتداد اکسیال اسپین قرار داره (دوبارهقانون دست راست را اعمال کنم).
تنها چیزی که در اصل باید حل کنید این است
$\frac{d\vec{L}}{dt}=\vec{r}\times\vec{F}$جایی که$\vec{L}$
تکانه زاویه ای است و$\vec{F}$
نیروی (گرانش) اعمال شده در موقعیت$\vec{r}$ است
.سادهترین مدل ژیروسکوپی که میتوانید با استفاده از این معادله آنالیز کنیددیسکی است که روی یک اکسیال میچرخد که عمود بر یک اکسیال دیگر (و گرانش) در فاصلهای قرار میگیره (البته همه چیز بدون اصطکاک در حال اسپین است).
وقتی ژیروسکوپ را برای چرخاندن از اکسیال اسپین فشار میدهمچه نیرویی احساس میکنم؟
بنابراین این سوال بسیار ساده استبا این حال مواد زیادی در ژیروسکوپ وجود داره
$\vec L=I\vec\omega$
اگر آن را طوری فشار دهید که در جهت دیگری بچرخدω'تکانه زاویه ای االان است:$\vec L'=I\vec\omega'$
فرض میکنم پوک Δt طول کشیدسپس یک تورک اعمال کردم
$\vec\tau = \frac{\vec L'-\vec L}{\Delta t}\rightarrow \frac{d\vec L}{dt}=I\frac{\Delta{\omega}}{\Delta t}$
البته انگشت تکان دهنده من فقط با نیروی$\vec f$ اعمال بشه
در فاصله ای$\vec r$
از اکسیال:$\tau = \vec r \times \vec f = rf\sin{\theta}=I\Delta{\omega}/\Delta t$
بنابراین مقاومت در برابر نیروی من این است:
$\frac{I}{r\sin\theta}\frac{\Delta\omega}{\Delta t}= \frac{I\alpha}{r\sin\theta}$
جایی که $\alpha$
اکسلریشن زاویه ای است.
).
اصول ژیروسکوپی
تمام اجسام در حال اسپین خاصیت ژیروسکوپی دارن. وژیروسکوپ ابزاری است متشکل از چرخی که در دو یا سه گیمبال نصب شده است که تکیهگاههای اکسیالی را برای چرخاندن چرخ حول یک اکسیال فراهم میکنه
در مورد یک ژیروسکوپ با دو گیمبالگیمبال بیرونیکه قاب ژیروسکوپ استبه گونه ای نصب بشه که حول اکسیالی در صفحه خودش که توسط تکیه گاه تعیین بشه
بچرخد. این گیمبال بیرونی یک درجه آزادی اسپینی داره و اکسیال آن هیچ درجه ای نداره. گیمبال دومگیمبال داخلیدر قاب ژیروسکوپ (گیمبال بیرونی) نصب شده است تا حول اکسیالی در صفحه خودش بچرخد که همیشه بر اکسیال اکسیالی قاب ژیروسکوپ (گیمبال بیرونی) عمود است. این گیمبال داخلی دو درجه آزادی اسپینی داره.
[/img]اکسیال چرخ چرخان (روتور) اکسیال اسپین را مشخص می میکنه روتور محدود به اسپین حول اکسیالی است که همیشه بر اکسیال گیمبال داخلی عمود است. بنابراین روتور دارای سه درجه آزادی اسپینی و اکسیال آن دارای دو درجه است. روتور به نیروی وارد شده به اکسیال ورودی توسط نیروی واکنش به اکسیال خروجی پاسخ می دهد.:
معادله اساسی که رفتار یک اسپین را توصیف میکنه به صورت زیر است:
${\displaystyle {\boldsymbol {\tau }}={{d\mathbf {L} } \over {dt}}={{d(I{\boldsymbol {\omega }})} \over {dt}}=I{\boldsymbol {\alpha }}}$
که در آن τ,Lبه ترتیب ممنتوم زاویهای و تورک ژیروسکوپI ممان اینرسی بردار ωانگولار ولوسیتیو αاکسلریشن زاویهای آن است. از این رابطه نتیجه میبشه که تورکτ که عمود بر اکسیال اسپین و بنابراین عمود بر L وارد بشه منجر به اسپینی در راستای اکسیالی عمود بر τو Lمیبشه. این حرکت precession نام داره. انگولار ولوسیتیΩP هم توسط ضرب خارجی زیر داده میبشه:
تورک وارد بر ژیروسکوپ از دو منبع تأمین میبشه. نیروی جاذبه که بهطور عمود به سمت پایین بر مرکز جرم وارد میبشه و یک نیروی مساوی به طرف بالا که به طرف تکیهگاه وسیله وارد میبشه.
چگونه یک ژیروسکوپ به اسپین ادامه می دهد؟
[/img] [/img]حرکت آن تحت تأثیر اصل تقدم ژیروسکوپی است که این مفهوم است که نیرویی که به یک جسم در حال اسپین وارد بشه حداکثر واکنش را تقریباً 90 درجه بعد خواهد داشت. واکنش ممکن است از 90 درجه متفاوت نیروهای قویتر دیگری در حال بازی هستند.ژیروسکوپ حول یک اکسیال عمودی حرکت می کنهزیرا تورک همیشه افقی و عمود بر L است. اگر ژیروسکوپ در حال اسپین نباشهانگولار مومنتومدر جهت تورک به دست میآورد (L=ΔL L = ΔL)و حول یک اکسیال افقی میچرخد و همنینطور که انتظار دارم میفته.ژیروسکوپ حول یک اکسیال عمودی حرکت می کنهزیرا تورک همیشه افقی و عمود بر L است. اگر ژیروسکوپ در حال اسپین نباشهتکانه زاویه ای در جهت تورک محاسبه میشه(L=ΔL) و حول اکسیال افقی میچرخه. همین طور که انتظار داشتم سقوط کرد.
.
اساساً حفظ تکانه زاویه ای است که تعیین می کنه ژیروسکوپ به چه سمتی بچرخد. نکته مهمی که باید متوجه شداین است که تکانه زاویه ای یک کمیت برداری استبا قدر و جهت معینی که در امتداد اکسیال اسپین قرار داره (دوباره قانون دست راست را اعمال کنم).
تنها چیزی که در اصل باید حل کنید این است
$\frac{d\vec{L}}{dt}=\vec{r}\times\vec{F}$جایی که$\vec{L}$
تکانه زاویه ای است و$\vec{F}$
نیروی (گرانش) اعمال شده در موقعیت$\vec{r}$ است
.سادهترین مدل ژیروسکوپی که میتوانید با استفاده از این معادله آنالیز کنم دیسکی است که روی یک اکسیال میچرخد که عمود بر یک اکسیال دیگر (و گرانش) در فاصلهای قرار میگیره (البته همه چیز بدون اصطکاک در حال اسپین است).
هنگامی که اکسیال اسپین ژیروسکوپ دیگر عمودی نیست مرکز جرم دیگر مستقیم بالای نقطه تکیه گاه قرار نمیگیردبنابراین از گرانش یک گیره می گیرید که تمایل داره ژیروسکوپ را واژگون میکنه در پاسخ به تورک اعمال شدهیک حرکت پیشروی شروع بشه.
یخوب مید.ونید ژیروسکوپ وسیله ای جهت حفظ جهت در راستای حفظ تعادل هست که از اصل بقای انگولار مومنتوم استفاده میکنهیک ژیروسکوپ مکانیکی همیشه یک چرخ یا دیسک چرخنده با اکسیال آزاد داره که میتواند در هر جهتی بایستد. بهترین روش تحلیل ریاضیه .اکسیالهای مختصات XYZ را به صورت شکل زیر برای ژیروسکوپ رسم میمیکنم تو این شکل g اکسلریشن گرانش است. نقطه G مرکز جرم دیسک را نشان میدهد. محل تکیهگاه نیز با P نمایش داده میبشه. مبدأ مختصات XYZنقطه P است. بردارهای J ،I و K بردارهای یکه هستند و به ترتیب جهت مثبت اکسیالهای Y ،X و Z رابه من نشون میدند.ابتدا من سرعت زاویه ای دیسک محاسبه کنم $\large\overrightarrow{\omega_w}=(\omega_s\sin\theta)\hat{J}+(\omega_s\cos\theta+\omega_p)\hat{K} $ از رابطه مشتق بگیرم $ \large\overrightarrow{a_w}=\frac{d[(\omega_s\sin\theta)\hat{J}]}{dt}+\frac{d[(\omega_s\cos\theta\:+\omega_p)\hat{K}]}{dt}$ خوب $\omega_s $ معلوم هست که صفر هست لذا رابطه ساده میشه$\large\overrightarrow{a}_w=-\omega_s\omega_p\sin\theta\:\hat{I} $ خوب سرعت زاویه ای میله $\large\overrightarrow{\omega}_r=\omega_p\:\hat{K} $ وچون انگولار ولوسیتی میله ثابت است و جهت آن هم تغییر نمیکنه اکسلریشن زاویهای آن صفر هست حالا نیروها و تورکهای وارد به دیسک را برسی میکنم تورک در نقطه G و در راستای اکسیال x را با Mx نشان دادهایم. تورکهای My و Mz نیز به طریقی مشابه تعریف میشه.با قانون دوم نیوتن اشنا هستید همون رابطه معروف $\large\sum_{}F_X=F_{GX}=m_wa_{GX}\\~\\
\large\sum_{}F_Y=F_{GY}=m_wa_{GY}\\~\\
\large\sum_{}F_Z=F_{GZ}-m_wg=m_wa_{GZ} $جرم دیسک با mw نمایش داده شده است. aGX اکسلریشن را در نقطه G و در راستای X نشان میدهم. اکسلریشنهای aGY و aGZ نیز به طوری مشابه و به ترتیب در جهتهای Y و Z تعریف میشه/$\large F_{GY}=m_wa_{GY} $خوب نقطه G روی یک مسیر افقی به شکل دایره و با سرعت ثابت حرکت میکنه پس اکسلریشن ممان اینرسی برابر صفر است.خوب اکسلریشن گرا در جهت y $ \large a_{GY}=-{\omega_p}^2(L\sin\theta)$ هستش.لذا نیرو $ \large F_{GY}=-m_w{\omega_p}^2(L\sin\theta)$ خوب نقطه G با سرعت ثابت روی یک دایره افقی حرکت میکنه اکسلریشن در راستای Z برابر با صفر است پس $\large F_{GZ}-m_wg=m_wa_{GZ}=0 $ و $ \large F_{GZ}=-m_w\:g$ حرکت اویلر را در جهت x برای جسم صلب به کاربرده و . این معادلات در دو جهت دیگر مساوی صفر هستند.$ \large \sum M_{Gx}=I_{Gx}\alpha_x-(I_{Gy}-I_{Gz})\omega_y\omega_z$ ببینید که نیروهای FGX ،FGY وFGZ حول نقطه G هیچ تورکی ایجاد نمیکنند. زیرا هر سه نیرو از نقطه G عبور کرده و طول بازوی تورک در آنها صفر است. در رابطه بالاIGx ،IGy و IGzبه ترتیب ممانهای اینرسی را حول نقطه G در جهتهای y ،x و z نشان میدهد $ \large I_{Gx}=I_{Gz}=\frac{1}{4}m_wr^2$ لذا $ \large I_{Gy}=\frac{1}{2}m_wr^2$معادله حرکت اویلر در جهت x به دست خواهد آمد $ \large M_x=-\frac{1}{4}m_wr^2\omega_s\omega_p\sin\theta-\frac{1}{4}m_wr^2(\omega_s+\omega_p\cos\theta)\omega_p\sin\theta$ در این بخش تورکهای وارد شده به میله را حول نقطه P بررسی کنم $ \large \sum M_{Px}=I_{Px}a_x-(I_{Py}-I_{Pz})\omega_y\omega_z$سرعت و اکسلریشن زاویهای میله در دستگاه xyz را میتونم به صورت زیربیارم $ \large \omega_x=0\:\:,\:\:\omega_y=\omega_p\cos\theta\:\:,\:\:\omega_z=\omega_p\sin\theta\\~\\
\large a_x=a_y=a_z=0$ ،که IPy و IPzبه ترتیب ممانهای اینرسی میله را حول نقطه P در جهتهای y ،x و z نشون میدهند$\large I_{Px}=I_{Pz}=\frac{1}{3}m_rL^2\\~\\
\large I_{Py}=0 $ من معادله اویلر در جهت اکسیال x مینویسم $ \large -m_rg\frac{L}{2}\sin\theta-F_{GZ}L\sin\theta+F_{GY}L\cos\theta-M_x\\
\large=\frac{1}{3}m_rL^2{\omega_p}^2\cos\theta\sin\theta$ ساده شده عبارت $\large {\omega_p}^2\cos\theta(\frac{1}{3}m_rL^2-\frac{1}{4}m_wr^2+m_wL^2)\\
\large=\frac{1}{2}m_wr^2\omega_s\omega_p-m_rg\frac{L}{2}-m_wgL $ هست پایداری ژیروسکوپ انگولار مومنتومتغییرات بردار انگولار مومنتومجسم صلب در بازه زمانی ti تاtf به صورت زیر محاسبه بشه. پارامتر Hf بردار انگولار مومنتومرا در لحظه نهایی tf نشان میدهد. بردار انگولار مومنتومدر لحظه اولیه ti نیز برابر با Hi است. بردار M همکه بیانگر تورکهای خارجی وارد به جسم صلب است.$ \large \sum \int_{ti}^{tf}\overrightarrow{M}dt={\overrightarrow{H}}_f-{\overrightarrow{H}}_i$[
انگولار مومنتومبین زمانهای ti و tf با ΔH نشان داده شده است. خوب تحلیل اسپین میخواهم رابطهای برای ارتباط بین زاویه θ و بردارهای HG و ωs پیدا کنم. با استفاده از ضرب داخلیرابطه زیر به راحتی به دست میاد$ \large \cos\theta=\frac{{\overrightarrow{H}}_G.\hat{J}}{|{\overrightarrow{H}}_G|}$ خوب مشتق بگیرم $ \large\frac{\text{d}\theta}{\text{d}t}=-\frac{{\overrightarrow{H}}_G}{\sin\theta\:|{\overrightarrow{H}}_G|}(\frac{\text{d}\hat{j}}{\text{d}t})$ عبارت زیر جایگذاری کنم $(\frac{\text{d}\hat{j}}{\text{d}t})=\overrightarrow{\omega}\times\hat{j} $ از مفهوم ضرب خارجی $ \large\frac{\text{d}\theta}{\text{d}t}=-\frac{(I_z-I_x)\omega_z\omega_x}{\sin\theta\:|{\overrightarrow{H}}_G|}$ هنگامی که مقادیر Ix وIz با یکدیگر برابر باشند $\frac{\text{d}\theta}{\text{d}t} $ نیز صفر هست $\omega_x=\frac{\text{d}\theta}{\text{d}t}=0 $ و ωp را برحسب یکدیگر محاسبه میکنم. از آنجایی که زاویه θ همیشه ثابت استانگولار مومنتومرا میتوان به صورت زیر و در دستگاه مختصات xyz بیان کرد.$ \large {\overrightarrow{H}}_G=(|{\overrightarrow{H}_G}|\cos\theta)\hat{j}+(|{\overrightarrow{H}_G}|\sin\theta)\hat{k}$ لذا خوب دارم $\large\omega_s=\omega_p\cos\theta\frac{I_w-I_{Gy}}{I_{Gy}} $]حالا چرا هنگام چرخاندن یک فرفره به حالت ایستاده بربرمیگرده
جای این که مانند برخی از بالای صفحه ها به یک نقطه تیز در پایین برسد یک پایین گرد داره. این اثر در تاپ هایی که شعاع انحنای بیشتری در پایین دارن بارزتر و چشمگیرتر است مانند حالت فوقانی بالای تیپ که دارای شعاع انحنای آنقدر بزرگ است که امکان داره مرکز جرم بالای آن باشه در ارتفاعی کوچکتر از شعاع انحنا. در واقع مقاله هایی که من دیده ام نشون میده که چگونه اصطکاک کشویی باعث بالا آمدن مرکز جرم یک تاپ بشه به طور خاص آنالیز بالای تاپ را انجام میدن
تجزیه و تحلیل یک بالا به طور کلی از جمله اثرات اصطکاک کاملاً پیچیدیه. برای ساده کردن تجزیه و تحلیل بسیار زیاده من فقط در یک لحظه به بالا نگاه میکنم که در آن بالا هیچ حرکت خطی نداره و یک انگولار موشنبسیار بزرگ داره که دقیقاً در امتداد اکسیال تقارن بالا قرار داره.
همچنین گرانش را در این توضیح ساده قابل چشم پوشی میدونم. گرانش باعث ایجاد یک تورک کاملاً افقی در قسمت بالایی بشه من فقط به تورک علاقه مند هستیم که دارای یک مولفه عمودی باشه که باعث بشه تا بالا به طور قائم تر بشه. در حقیقت اگر جاذبه سطح و میز را به هم نمیچسبونه هیچ اصطکاک لغزشی در نقطه تمنس بین این دو وجود نداره اما من به راحتی تصور خواهم کرد که اصطکاک کشویی وجود داره بدون در نظر گرفتن چگونگی اصطکاک کشویی مربوط به گرانشه
از آنجا که بالای آن به جای پایین نوک تیز یک گرد داره نقطه تماس بالای آن در P نیست بلکه در بعضی از نقاط C است. از فرضیات گفته شده در بالا در لحظه مورد علاقه P ثابت است. در مقابل از جهت$ \vec{L}$ در C سطح بالا به سمت بیننده در حال حرکت است مستقیم از صفحه نمودار به سمت بالا. اصطکاک کشویی یک نیروی$ \vec{F}_k$ (نشان داده نشده) در بالا در C در جهت مخالف حرکت بالا در آن نقطه است یعنی مستقیما به سمت پایین
بردار موقعیت C از$\vec{X}_C $ است. نیروی $\vec{F}_k $ در بالا یک تورک در قسمت بالای مرکز جرم بالای آن تولید میکنه
$\vec{\tau} = \vec{X}_C \times \vec{F}_k \,\, . $
تورک $\vec{\tau} $ را میتونم اینطور بگم $ \vec{\tau}=\vec{\tau}_{\parallel}+\vec{\tau}_{\perp} \,\, ,$
جایی که$ \vec{\tau}_{\parallel}$ موازی$\vec{L} $ است و$ \vec{\tau}_{\perp}$ عمود بر $\vec{L} $ است.
تورک $ \vec{\tau}$ این است که انگولار موشن$\vec{L} $ با زمان تغییر میکنه ،$\frac{d\vec{L}}{dt} = \vec{\tau}=\vec{\tau}_{\parallel}+\vec{\tau}_{\perp} \,\, . $
اگه$\vec{\tau}_{\parallel} $در جهت مخالف $ \vec{L}$ قرار داره بنابراین اثر$\vec{\tau}_{\parallel} $ کاهش بزرگی $ \vec{L}$ است به عنوان مثال کاهش سرعت بالا.
اگر قسمت بالای آن در فضای خالی باشه اثر $ \vec{\tau}_{\perp}$ چرخاندن قسمت بالای آن در جهت O در جهت ساعت در نمودار خواهد بود. با این وجود به دلیل محدودیتی که قسمت بالای صفحه با جدول در تماس است اثر $\vec{\tau}_{\perp} $ این است که O را از جدول بلند کرده و O را به بالاتر از C نزدیک میکنه
بالا یک بدنه متقارن سفت و سخت است. معادلات حرکت یک جسم صلب در اطراف مرکز جرم آن توسط: .
$I_1\dot\Omega_1=(I_2-I_3)\Omega_2\Omega_3 $
$ I_2\dot\Omega_2=(I_3-I_1)\Omega_3\Omega_1$
$ I_3\dot\Omega_3=(I_1-I_2)\Omega_1\Omega_2$
فرض کنید که بالای سفت و سخت در مورد یک اکسیال متقارن است (بگذارید بگوییم اکسیال سوم) بنابراین من دارم:
$I_1=I_2 $
و همچنین اینکه اکسیال سوم باریک است:$I_3<I_1(or I_2) $
در این حالت معادله سوم حرکت دلالت داره$ \Omega_3=\Omega = const.$
و به جای دو معادله دیگر محاسبه میکنم
$I_1\dot\Omega_1=(I_2-I_3)\Omega\Omega_2 $
$I_2\dot\Omega_2=(I_3-I_1)\Omega\Omega_1 $
با استفاده از مشتق اول معادله دوم با توجه به زمان و جایگزینی معادله دوم به دست می آوریم:$I_1I_2\ddot\Omega_2= \Omega^2 (I_3-I_1)(I_2-I_3)\Omega_2 $
این یک معادله یک نوسان ساز هارمونیک است:$ \ddot\Omega_2+k^2 \Omega_2 = 0$با$ k^2= - \frac{\Omega^2 (I_3-I_1)(I_2-I_3)}{I_1I_2}$
االان مشاهده کنید که k ^ 2> 0$ $از آنجا که $I_3-I_1<0 $ و$I_2-I_3>0 $ بنابراین ثابت فنر واقعی است و نوسان ساز هارمونیک پایدار است.
این اثر ژیروسکوپی نامیده بشه و بیان میکنه که شیئی که در حال اسپین است دارای یک انگولار موشناست $ \vec{L}$ بنابراین تمایل داره که اکسیال اسپین خود باقی بمونند ،$\vec{L}=I\omega $ سریعتر میچرخه (ω بیشتر) بیشتر تمایل داره که اکسیال اسپین خود باقی بمونند.
یک اسپین با سرعت زاویه ای ω میچرخه بنابراین دارای یک حرکت زاویه ای$\vec{L} $ است سریعتر$ \vec{L}$ بیشتر میچرخه و بیشتر تمایل داره که حرکت اسپینی خود را در مورد یک اکسیال خاص حفظ کنه توجه دارم که وقتی سرعت آن کاهش مییابه (به دلیل نیروهای اصطکاک)$ \vec{L}$ کمتری داره بنابراین ترجیح آن به دلیل سنگین شدن آن به سمت پایین افزایش مییابه
میدونمکه نیروی گرانش باعث اسپین بالای اسپین ماشینی (پیش از اسپین اسپینی آن بشه) بنابراین میدونم از این مشاهده نتیجه بگیرم که برای تغییر اکسیال اسپین اسپین باید نیرویی اعمال بشه بیشترین نیرویی که بیشتر از قبل از آن استفاده خواهد کرد اکسیال اسپین (با فرض ثابت بودن L⃗). وقتی این نیرو برداشته بشه به دلیل داشتن اکسلریشن زاویه ای به طور طبیعی و بدون هیچ گونه مقدماتی به حالت اولیه برمیگرده
به عنوان قانون اول نیوتون فکر کنید من به جای حرکت انتقالی در حرکت اسپینی است.قانون اول نیوتون اظهار داشت:جسمی که در حال حرکت است تمایل داره که در حرکت بمونند و در یک خط مستقیم حرکت کنه مگر اینکه توسط یک نیروی نامتعادل عمل میکنه من میدونم قانون را برای حرکت اسپینی دوباره ایجاد کنم جسمی که در حال اسپین است تمایل داره که حرکات اسپینی در مورد یک اکسیال خاص باقی بمونند مگر اینکه توسط یک نیروی نامتعادل عمل میکنه
جسمی که دارای یک حرکت انتقالی با سرعت v باشه به نیروی $ \vec{F}$ نیاز داره تا جهت حرکت خود را به طور مشابه تغییر دهد شیئی که دارای سرعت زاویه ای ω است برای تغییر اکسیال اسپینی خود به نیرو احتیاج داره.تورک به عنوان گرایش نیرو برای اسپین یک جسم در مورد یک اکسیال و از نظر ریاضی به عنوان یک حاصل بردار (ضربدری) از فاصله و نیرو تعریف بشه:$ \vec{\tau}=\vec{r}\times\vec{F}$جایی که r فاصله ای از نقطه اسپین است و$\vec{F} $ به آن نیرو وارد بشه.
میدونمکه تورک یک بردار است و این بردار در در این پیج اوردم
اسپین بالا تقریباً عمودی بشه زیرا دارای انگولار موشن هست و این بدان معناست که اگر جسمی بچرخد در مقابل اکسیال اسپین خود مقدمه گرفته و سریعتر بچرخد در مقابل این مقدمه مقاومت میکنه تا اتفاق بیفتد بنابراین اگر هنوز آن را برعکس کردم میچرخه با همون سرعت زاویه ای به سرعت صفر باز میگرده سریعتر میچرخه سریعتر به حالت اولیه خود باز میگرده.
برای توضیح این موضوع از نظر ریاضی یک در حال اسپین روی زمین با سرعت زاویه ای ω در نظر گرفتم و دارای سرعت زاویه ای شیب ω پی و زاویه شیب دار
انگولار موشن به صورت زیر تعریف بشه:$\vec{L}= \vec{\omega} I $
بگویید اسپین بالای Δθ چرخانده و تغییر آن در انگولار موشنΔL است.
سپس میدونمΔθ را به صورت زیر بیان کنم$ \Delta \theta \approx \frac{\Delta L}{L sin(\phi)}$
سرعت زاویه ای حق تقدم را میتونم به اینطور بگم:$\omega_p = \frac{\Delta \theta}{\Delta t} $
االان میدونم معادله اول را در این معادله جایگزین میکنم.$\omega_p = \frac{\Delta L}{\Delta t L sin(\phi)} $
تورک به عنوان تغییر در انگولار موشن تعریف بشه:
$\frac{\Delta L}{\Delta t}= I \vec{\alpha} = \tau $
حالا این را در معادله قبلی جایگزین میکنم:$\omega_p = \frac{\tau}{L sin(\phi)} $
و فرمول زیر را دریافت میکنم:$\omega_p = \frac{\vec{F}r}{L sin(\phi)} $
از این معادله میتونم بفهمم که اگر نیرویی را روی جسمی در حال اسپین وارد میکنم ωp آن افزایش پیدا میکنه زیرا با نیروی اعمال شده متناسب است. اگر نیروی اعمال شده صفر باشه ωp نیز صفر بشه بنابراین دیگر سرعت زاویه ای فوق العاده ای نخواهد داشت بنابراین دوباره به صورت ایستاده ایستاده است.
