
ملاقات مداری یا رویارویی مداری، یه مسئله فضاییه که تو مهندسی فضایی و علوم مخابرات پیش میاد. این موضوع مربوطه به اینه که دو یا چندتا شیء فضایی، مثل ماهواره یا فضاپیما، با هم تداخل داشته باشن و با هم تداخل کرده باشن. این تداخل میتونه به دو شکل باشه:
۱. ملاقات دلتا-وی: تو این حالت، دو تا شیء فضایی به هم نزدیک میشن و بعد یه مدت، فاصله بینشون کم میشه.
۲. ملاقات دلتا-وی نهایی: تو این حالت، دو تا شیء فضایی به هم نزدیک میشن و بعد یه مدت، یکی با یکی تداخل کرده و یه مدار جدید شکل میده.
اصول دینامیک مداری هم مربوط به حرکت اجسام فضایی تو مدارشونه. این اصول به ماهوارهها، فضاپیماها و اجسام فضایی دیگه کمک میکنه که مسیر حرکتشون رو بهترین شکل ممکن دنبال کنن. چند تا اصل دینامیک مداری مهم:
قانون حفظ انرژی: انرژی یه سیستم مداری حفظ میشه و مجموع انرژی کینتیک و پتانسیل هر جسم فضایی تو مدارش ثابته.
قانون حفظ جنبش: جنبش یه نقطه نسبت به مرکز جاذبه حفظ میشه مگه اینکه نیروهای خارجی تغییر بده.
قانون کلی اصطکاک: اگه هیچ نیروی خارجی اعمال نشه، جسم فضایی تو مدارش حرکت میکنه تا زمانی که نیروهای داخلی (مثل موتورها یا سیستمهای کنترل) تغییراتی اعمال نکنن.
این اصول به مهندسین فضایی کمک میکنه تا مدارهای بهینه برای مأموریتهای مختلف طراحی کنن و حرکت اجسام فضایی رو با دقت مدیریت کنن.
دوست من، بیا برگردیم به حوزه فضا و مدارها. مدار ترابرد هوهمان یه جورایی راه بهینهایه که ازش استفاده میشه که ابزارهای فضایی رو از یک مدار به مدار دیگه منتقل کنیم. خصوصاً وقتی دو مدار همدیگه رو قطع نمیکنن و شعاعشون فرق داره.
حالا یه توضیح سریع بدم، اول ابزار فضایی رو تو یه مداری که اسمش مدار مبدأه قرار میدیم، میذاریم. بعد با یه تغییر سرعت که ازش با
Δv یاد میشه، اونو به مدار ترابرد هوهمان منتقل میکنیم. در نهایت، با یه تغییر سرعت دیگه، به مدار مقصد میرسونیم.
خوبی این مدار تو کمترین مصرف انرژیه. چون از تفاوت سطوح انرژی در دو مدار استفاده میکنه، میتونه با انرژی کمتری انتقال انجام بده.
ازش در مأموریتهای فضایی خیلی استفاده میشه، مخصوصاً وقتی انرژی محدودی برای تغییر سرعت داریم، مثل مأموریتهای اکتشاف سیارات و اجسام فضایی. این مدار به دلیل بهینه بودنش تو طراحی مأموریتهای فضایی حیاتیه.
حالا میخواهیم مسئله ملاقات مداری را با استفاده از فرمول و معادلات لاگرانژی بیان کنم. ابتدا باید لاگرانژی سیستم را تعریف کنم.
فرض کنید دو جسم فضایی با جرمهای m1,m2 در فضا حرکت میکنن. فرض میکنم من q1,q2
زوایای مختلف یا مختصات مکانی این دو جسم باشن. همچنین، $dot{q}_1$و$dot{q}_2$
سرعتهای متناظر با مختصات هستن
حالا تابع لاگرانژی (L اینطوره:L=T−Uکه در آن:T نمایانگر انرژی کینتی (حرکتی) سیستمهU نمایانگر انرژی پتانسیله
حالا بیایید این تابع را برای مسئله ملاقات مداری دو جسم فضایی با محدودیت مورد نظر بگم
\[
L = T - U + \lambda(f(q_1, q_2) - 2a)
\]
اگر محدودیت ما این باشد که دو جسم همیشه فاصله ثابتی از یکدیگر داشته باشن (مثلاً به دلیل یک میله صلب بدون جرم میشه معادله محدودیت اینطور بیارم
\[
m_1 \ddot{q}_1 = -\frac{\partial U}{\partial q_1} + \lambda \frac{\partial f}{\partial q_1}
\]
ملاقات دلتا-وی} چیه ، ما میتوانیم از اصول دینامیک مداری استفاده کنیم. ملاقات دلتا-وی زمانی رخ انجام میشه که دو شیء فضایی به یکدیگر نزدیک بشن و پس از گذشت یک مدت فاصله بین آنها کم میشه این موقعیت را میتوان با استفاده از انرژیها و متغیرهای مکانی توصیفش کرد
اگر $E$ انرژی کل سیستم و $r$ فاصله بین دو شیء فضایی باشه من از معادله حفظ انرژی استفاده کردم
\[
E = \frac{1}{2} m_1 \dot{r}_1^2 + \frac{1}{2} m_2 \dot{r}_2^2 - \frac{G m_1 m_2}{r}
\]
که در اینجا:
\begin{align*}
m_1 & \text{ - Mass of the first space object} \\
m_2 & \text{ - Mass of the second space object} \\
\dot{r}_1, \dot{r}_2 & \text{ - Relative velocities between them} \\
G & \text{ - Gravitational constant}
\end{align*}
حالا باید این معادله را حلش کنم تا زمانی که فاصله بین دو شیء به مقدار مورد نظر کاهش یابه
در مورد ملاقات دلتا-وی نهایی، ممکنه یکی از شیءها به دیگری نزدیک شده و با آن تداخل کنه سپس یک مدار جدید شکل بگیره این موقعیت بسیار پیچیده هستش و معمولاً نیاز به مدلهای دینامیکی دقیقتر داره که از اصول فیزیک نیوتنی یا همینگتونی برای حل مسائل استفاده میشه.
معادلات حرکت برای اولین شیء (با جرم
$m_1$
) و دومین شیء (با جرم
$m_2$
) ممکن است به شکل زیر باشد:
برای اولین شیء:
\[
m_1 \mathbf{r}_1'' = -\frac{G m_1 m_2}{\|\mathbf{r}_1\|^3} \mathbf{r}_1 + \mathbf{F}_{\text{برخورد}}
\]
برای دومین شیء:
\[
m_2 \mathbf{r}_2'' = -\frac{G m_1 m_2}{\|\mathbf{r}_2\|^3} \mathbf{r}_2 - \mathbf{F}_{\text{برخورد}}
\]
در اینجا:
\begin{align*}
\mathbf{r}_1'' & \text{ - Acceleration of the first object} \\
\mathbf{r}_2'' & \text{ - Acceleration of the second object} \\
\mathbf{F}_{\text{collision}} & \text{ - Force resulting from the collision, modeled based on specific problem conditions} \\
\|\mathbf{r}_1\|, \|\mathbf{r}_2\| & \text{ - Magnitudes of position vectors of the first and second objects} \\
G & \text{ - Gravitational constant}
\end{align*}
این معادلات به حل عددی نیاز دارن م نرم افزار ها نیاز دارنChatGPT
وقتی دو سفینه فضایی میخوان برای ملاقات یا اتصال به هم برن، این یعنی که باید در فضا با دقت و هماهنگی به هم نزدیک بشن. برای این کار، نیاز به محاسبات دقیقی داریم تا مسیرها و زمانهایی که برای رسیدن به هدف مشترک بین دو سفینه نیازه رو محاسبه کنیم.
برای انجام این محاسبات، از نرمافزارهای مختلفی استفاده میشه. به عنوان مثال:
۱. STK (Systems Tool Kit): این نرمافزار یکی از معروفترین ابزارهای مهندسی فضاییه که برای محاسبه مسیرها و تراجاکتوریهای فضایی استفاده میشه. این نرمافزار قابلیتهای متنوعی داره که از تحلیل دقیق مدارات فضایی گرفته تا شبیهسازی مراحل مختلف یک ماموریت فضایی.
۲. GMAT (General Mission Analysis Tool): این نرمافزار نیز برای محاسبات مرتبط با مسیرهای فضایی و تراجاکتوریها استفاده میشه. GMAT قابلیتهای شبیهسازی و تحلیل متنوعی داره که برای برنامهریزی و اجرای مأموریتهای فضایی استفاده میشه.
۳. MATLAB/Simulink: این نرمافزارها همچنین قابلیتهای محاسباتی بسیار زیادی برای مدلسازی و شبیهسازی سیستمهای فضایی دارن. اینجاست که میشه مدلهای ریاضی برای مسیریابی و محاسبه تراجاکتوریهای فضایی ایجاد کرد.
این نرمافزارها به مهندسان و علمای فضا کمک میکنند تا مسیرها و تراجاکتوریهای بهینه را برای ماموریتهای فضایی مشخص کنند و از اتصال و ملاقات دو سفینه فضایی با دقت بیشتری اطمینان حاصل کنن.
تو فضا، اتصالات مداری دارن مشخصه خودشون و دینامیک خاص خودشون رو دارن که به دلیل شرایط خاص فضا، با اتصالات مداری تو زمین فرق دارن. دینامیک اتصالات مداری تو فضا شامل عواملی مثل:
۱. شرایط هوایی: تو فضا شرایط خاصی مثل دما، فشار، نور خورشید، و اشعههای مضر مثل پرتوهای خورشیدی و پرتوهای فضایی وجود داره که میتونن روی جریان الکتریکی و عملکرد اتصالات مداری تأثیر بذارن.
۲. تغییرات دینامیکی مدارها: تو فضا، مدارها ممکنه تحت شرایط مختلفی مثل شتاب، سرعت، و جهت تغییر بشن. این تغییرات میتونن تأثیرات قابل توجهی روی اتصالات مداری داشته باشن، مثلاً به عنوان نویز و اختلالات در اتصالات مداری.
۳. تأثیرات میدانهای الکترومغناطیسی: تو فضا، مدارات ممکنه تحت تأثیر میدانهای الکترومغناطیسی باشن که میتونه ولتاژها و جریانهای ناخالص رو تغییر بده.
۴. مقاومت برخورد با ذرات فضایی: ذرات فضایی مثل ذرات خورشیدی و کیهانی میتونن روی اتصالات مداری اثر بذارن و باعث خرابیها و اختلالات در اونها بشن.
در کل، دینامیک اتصالات مداری تو فضا براساس شرایط خاص فضا و تأثیرات محیطی و مداری واقعیه که ممکنه به شدت از محیطهای زمینی مختلف باشه.
ملاقات مداری
-
rohamavation

نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3289-
سپاس: 5494
- جنسیت:
تماس:
-
rohamavation
نام: roham hesami radرهام حسامی راد
محل اقامت: 100 مایلی شمال لندن جاده آیلستون، لستر، لسترشر. LE2
عضویت : سهشنبه ۱۳۹۹/۸/۲۰ - ۰۸:۳۴
پست: 3289-
سپاس: 5494
- جنسیت:
تماس:
Re: ملاقات مداری
اوکی، برای ملاقات دو تا فضاپیما تو فضا، اوضاع خیلی حساس و دقیقه. دوست داری بدونی چجوری این ملاقاتای مداری بین فضاپیماها اتفاق میافته؟
خب، اول از همه، هر دو فضاپیما باید تو یک صفحه مدار باشن و فاز مدارشون هم باید با هم تطابق داشته باشه. اینجوری میشه ازشون استفاده کرد تا به هم نزدیک بشن.
بعد، وقتی میخوان مدارشون رو تغییر بدن، از چیزی به اسم "مانور" استفاده میکنن. این مانور عبارته از انتقال فضاپیما از یه مدار به مداری دیگه. برای این کار، باید موتورهای فضاپیما روشن بشن تا یه نیرویی به اسم "پیشرانش" ایجاد بشه که باعث تغییر سرعت مداری فضاپیما میشه.
این پیشرانش خیلی زود اتفاق میافته، یعنی تو یه مدت خیلی کوتاهی نسبت به دوره تناوب مدار. در واقع، تغییر شعاع مداری رو نادیده میگیرن.
با فرض اینکه شعاع مدار ثابته و فقط سرعت یا جهت سرعت تغییر میکنه، تکانه زاویهای مدار و انرژی مکانیکی مدار تغییر میکنن که باعث میشه مدار تغییر کنه و یه مانور مداری انجام بشه.
بین همه مانورهای مختلف، بهترین و به صرفهترینش "انتقال هوهمان"ه. این مانور یه مدار بیضیه که به هر دو مدار دایروی مماسه. یعنی حضیض این مدار به اندازه شعاع مدار کوچیکتر و اوجش به اندازه شعاع مدار بزرگتره.
وقتی این مانور رو انجام میدن، دو تا ضربه ایجاد میشه. ضربه اول سفینه رو از مدار اولیه جدا میکنه و به مدار هوهمان منتقلش میکنه. ضربه دوم هم سفینه رو از مدار هوهمان وارد مدار ثانویه میکنه.
مقدار تغییر سرعتی که تو هر مرحله باید توسط موتورهای فضاپیما ایجاد بشه، برابر با اختلاف سرعت دو مدار تو اون نقطه است. به این شکل میشه مدار فضاپیماها رو با دقت بالا تغییر داد و به ملاقات همونطور که میخوان رسید.
خب، در شکل بالا برای اینکه ماهواره از مدار ۱ به مدار ۲ منتقل بشه، باید تو نقطه A یک ضربه به ماهواره وارد بشه. اختلاف سرعتی که این ضربه باید ایجاد کنه، برابره با اختلاف سرعت حضیض مدار هوهمان و سرعت مدار ۱. بعدش ماهواره وارد مدار انتقال هوهمان میشه. تو نقطه B برای اینکه ماهواره از مدار انتقال هوهمان وارد مدار ۲ بشه، باید یه ضربه ایجاد کنیم. اختلاف سرعتی که این ضربه تولید میکنه، برابره با اختلاف سرعت اوج مدار هوهمان و سرعت مدار ۲.
یه نکتهای که باید توجه کنیم اینه که مدت زمان مانور نصف دوره تناوب مدار هوهمانه، چون انتقال تو نیمی از دوره تناوب کامل انجام میشه.
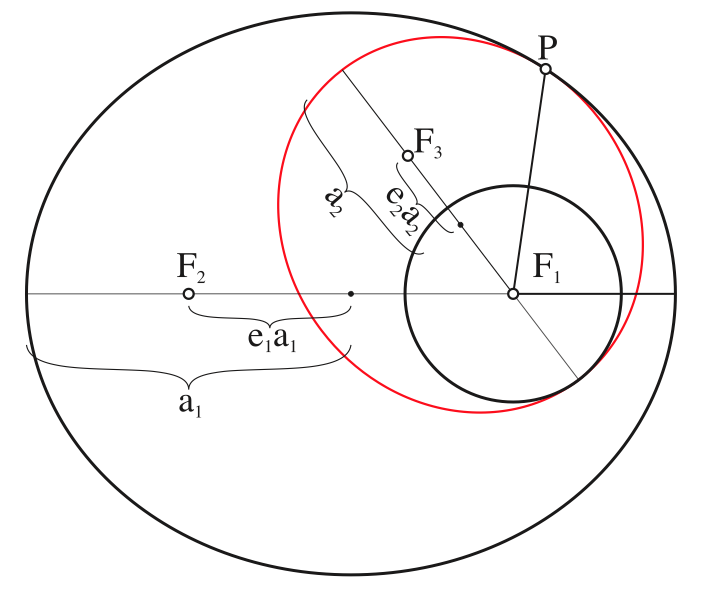
برای داشتن یه مدار کاملا دایروی، باید انرژی مدار دقیقاً یه مقدار مشخص باشه. این موضوع غیر ممکنه چون عدم قطعیتی که تو انجام یه پروژه هست به مراتب بیشتر از دقت انرژی مداره. هر چند، ما باید به دنبال یه انتقال دو ضربهای بین مدارهای بیضی هممحور باشیم. به این نوع مانور مداری "انتقال هوهمان تعمیم یافته" میگیم.
باید به دو نکته زیر توجه کنیم:
محورهای اصلی هر دو بیضی باید کاملاً بر هم تطابق داشته باشن، به طوری که بیضی انتقال تو نقاط اوج یا حضیض به دو مدار مماس باشه.
در شرایط مختلف، دو مدار انتقال هوهمان ممکنه وجود داشته باشه. یکی از اونها از نظر انرژی بهتره. ولی بسته به نیازهای ما، میتونیم از هر دو استفاده کنیم. محاسبات مربوط به اندازه ضربهها هم مثل انتقال هوهمان دایرویه. اندازه تغییر سرعتی که باید به سفینه اعمال کنیم، برابر با اختلاف سرعت در مدار اولیه و مدار هوهمانه.
به عنوان مثال در انتقال شماره ۳، که از حضیض مدار ۱ به اوج مدار ۲ انجام شده، تو این انتقال حضیض مدار هوهمان به حضیض مدار ۱ و اوج مدار هوهمان به اوج مدار ۲ مماسه. اندازه تغییر سرعت اولیه برابر با اختلاف سرعت حضیض مدار هوهمان و حضیض مدار ۱ و اندازه تغییر سرعت دوم برابر با اختلاف سرعت اوج مدار ۲ و اوج مدار ۳ه.
در نهایت باید بگیم که انتقال هوهمان تعمیم یافته میتونه بین مدارهای بیضی و هزلولی یا مدارهای بیضی و سهمی و هر دو مدار دیگهای اتفاق بیفته، به شرط هممحور بودن دو مدار.
حالا مانور تغییر فاز (phasing maneuvers) برای تغییر مکان ماهواره در مدار خودش استفاده میشه.
به عنوان یک مثال، دو تا سفینه توی دورههای مختلف دور زمین گردش میکنن، اما یکی از این سفینهها میتونه با انجام یک حرکت مخصوص خودش رو به سفینه دیگهای که تو مداره، برسونه.
رای انجام این حرکت، اول سفینه یا ماهوارهای که میخوایم مکانش تو مدار تغییر بدیم رو به یه مدار دیگه انتقال میدهیم، به طوری که مدار جدیدش با مدار قبلیش مماس باشه و دوره چرخشش توی اون مدار به شکلی باشه که وقتی به نقطه تماس دو مدار میرسه، نقطه هدف تو مدار اولیه هم به جایگاهش برسه.
برای مثال، فرض کن که یه ماهواره به اسم P داشته باشیم که تو مدار GEO قرار داره. میخوایم این ماهواره رو به نقطه B برسونیم. برای این کار، اول ماهواره رو تو نقطه P با یه ضربه به مدار 2 منتقل میکنیم. دوره چرخش مدار 2 بیشتر از مدار 1ه و باید به شکلی باشه که وقتی ماهواره به نقطه P میرسه، نقطه B تو مدار 1 یه دور کامل به علاوه 12 درجه به جلو حرکت کرده باشه. بعد باز به ماهواره تو نقطه قبلیاش ضربهای وارد میکنیم و اون رو به مدار 1 باز میگردونیم.
یه نکته: اگه بخوایم ماهواره رو به عقب ببریم (مثل ماهوارهای که در شکل بالا 12 درجه به عقب رفته)، باید اون رو به یه مدار ثانویه با دوره چرخشی بیشتر از مدار اولیه منتقل کنیم. اما اگه ماهواره رو به جلو بخوایم ببریم، باید اون رو به مداری با دوره چرخشی کمتر از مدار اولیه منتقل کنیم.
یه نکته دیگه: نقطهای که ضربه اولیه به ماهواره وارد میشه حضیض یا اوج مدار ثانویهاشه.
یه نکته دیگه: در این نوع انتقال، اندازه ضربه اولیه و ثانویه یکسانه چون هر دو ضربه رو تو یه نقطه به ماهواره وارد میکنیم.
یه نکته دیگه: نیازی نیست که ماهواره بعد از یه دور گردش تو مدار ثانویه به نقطه هدف برسه. به عنوان مثال، میتونیم ماهواره رو به مداری منتقل کنیم که بعد از هر دور گردش تو دور زمین، 4 درجه به نقطه هدف نزدیکتر بشه (یعنی دوره چرخش ماهواره با دوره چرخش نقطه هدف به علاوه زمانی که 4 درجه تو مدارش به جلو حرکت میکنه)، بنابراین ماهواره بعد از 3 دور گردش تو مدار انتقال به نقطه هدف میرسه.
برای باراندازی، باید سرعت دو وسیله نقلیهی ما هم منطبق باشه. تعقیبکنندهی ماهواره تو مداری کمی پایینتر از هدف قرار میگیره. در نهایت، با توجه به دو فضاپیما (مثلاً ISS و یک کپسول تامین مجدد بدون سرنشین)، این دو فضاپیما چطور میتونن تو فضا با هم ملاقات کنن؟ اگه با همون سرعت تو فضا حرکت کنن، هیچ وقت به هم نخواهند رسید. اگه کسی بخواد سریعتر حرکت کنه، به مداری بالاتر هدایت میشه. ایا به سادگی یه تفاوت سرعت بسیار جزئی ایجاد میکنن (بنابراین تفاوت ارتفاع خیلی کوچیکی خواهد بود) و سپس منتظر میمونن تا این دو با هم هماهنگ بشن؟
این فرآیند خیلی پیچیده است، چون وقتی نزدیک هدف باشم و سعی کنم به سمتش پیش برم، ممکنه مدارم به سمت دیگهای سیاره منحرف بشه. وقتی سعی میکنم با بالا بردن مدار، زاویه فاز رو تغییر بدم، پیشبینی کردن خیلی دشواره. چون وقتی مدارم از مدار هدف فرق میکنه، زاویه فاز ثابت نمیمونه. اگه اختلاف زاویه فاز زیاد باشه، یا باید خیلی سوخت مصرف کنم که مدارم رو تغییر بدم، یا باید منتظر بمونم تا به هدف برسم. همه اینا خیلی خطاپذیر و زمانبره. بازی KSP قوانین و مقررات واقعی رو الزامی نمیکنه، پس مشکل کمی سادهتره. تا زمانی که بتونم حتی یک تفاوت کوچک در فاز ایجاد کنم، فقط میتونم زمان را افزایش بدم و منتظر بمونم تا هماهنگ بشه. ولی مطمئنم که در واقعیت، فرستادن فضانوردان به فضا و سپس نشستن در مدار برای روزها یا هفتهها و تنظیم دقیق زاویه فازشون با ISS، کاملاً منطقی نیست. پس آژانسهای فضایی چطور ماموریتهای قرار ملاقات خودشون رو برنامهریزی میکنن؟ آیا میتونن به دقت زمان پرتاب رو تخمین بزنن و وقتی مدارها هماهنگ میشن، در مرحله مناسب قرار بگیرن؟ یا آیا یه الگوریتم خوبی برای هماهنگی بهینه مدارها وقتی که قرارها تو مدار هستند، وجود داره؟ اولین قدم برای برنامهریزی یک قرار ملاقات، تعیین فرصتهای راهاندازی و پنجرههای زمانیه. قرار ملاقات مشارکتی شامل یک وسیله نقلیه تعقیبکننده فعال و یک وسیله نقلیه هدف غیرفعال است. اگه وسیله نقلیه تعقیبکننده راهاندازی بشه، مثل همه وسایل نقلیه که اشاره شد، این اتفاق نمیتونه هر زمانی رخ بده.
اولین مرحله برای برنامهریزی قرار ملاقات، تعیین فرصتهای راهاندازی و پنجرههای زمانیه. قرار ملاقات مشارکتی شامل یک وسیله نقلیه تعقیبکننده فعال و یک وسیله نقلیه هدف غیرفعاله. اگه وسیله نقلیه تعقیبکننده راهاندازی بشه، مثل همه وسایل نقلیه که اشاره شد، این اتفاق نمیتونه هر زمانی رخ بده. پرتاب در هر زمان لزوماً مستلزم تغییرات بسیار گرانقیمت هواپیما است.
وقتی پرتاب باعث میشه که تعقیبکننده در همون صفحه مداری وسیله نقلیه مورد نظر قرار بگیره، وسیله نقلیه باید پرتاب شه. این تقریباً دو بار در روز، نزدیک به زمانی که هواپیمای مداری از محل پرتاب عبور میکنه، اتفاق میافته. تعقیبکننده هم باید به گونهای پرتاب کنه که در همون جهت هدف حرکت کنه. این به همراه محدودیتهای پرتاب (مثلاً یک وسیله نقلیه نمیتونه از کیپ به سمت جنوبغربی پرتاب شه) فرصتهای پرتاب دو بار در روز را به یک کاهش میدهد.
کپسولی که داره رو به ایستگاه فضایی بینالمللی میره، برای رسیدن به آداپتور لنگرگاه از سوختگی شعاعی استفاده میکنه. یعنی برای تغییر ارتفاعش، سوختی مصرف میکنه که به سمت یا علیه جهت حرکتش باشه. این کپسول دائماً توی یه مسیر معین داره حرکت میکنه که خطی بین کانون مدارها و کپسول و آداپتور اتصال هست.
فاصله بین این کپسول و ایستگاه فضایی بینالمللی کمه، حدوداً 20 متر، و سرعت نسبی بینشون تقریباً صفره. وقتی کپسول به ایستگاه نزدیک میشه، یعنی در فواصل کوچیکتر، سوختگی شعاعی استفاده میشه که باعث میشه فاصله بین کپسول و ایستگاه افزایش پیدا کنه. این تغییرات خیلی کوچیکه که میشه با استفاده از رانشگرهای کوچیک کنترلشون کرد.
اما وقتی فاصله بزرگتر میشه، یعنی توی فاصله 40 کیلومتری، تأثیر گرانش زمین بیشتر میشه و سوختگی شعاعی کافی نیست. توی این فواصل، باید از روشهای ترانسفر هومن استفاده کنن. یعنی اول با رویکردهایی که به صورت رتروگراد هستن، کپسول باید ارتفاعش رو کم کنه، بعد از اون به سمت ایستگاه حرکت کنه.
به طور کلی، این سوال نشون میده که بسته به فاصله و شرایط مختلف، نیاز به روشهای مختلفی برای تغییر ارتفاع و حرکت داریم.
مدار انتقال hohmann transfer را می توان برای انتقال مدار یک جسم به سمت جسم دیگر استفاده کرد تا زمانی که آنها جسم مشترک و پرجرمتری دارن که به دور آن می چرخند. در زمینه زمین و منظومه شمسی این شامل هر جسمی است که به دور خورشید می چرخد.با تغییر سرعت
v به میزان ${\displaystyle \Delta v}،$ فضاپیما وارد مدار جدیدی میشود، که دارای نقطهٔ مشترک r با مدار قدیمی است. به همین دلیل فقط سه عنصر مداری تغییر میکنند ( سه ترکیب خطی از عنصرهای مداری غیر وابسته)، در حالی که دیگر عناصر ثابت میمانند. برای تغییر هر شش عنصر مداری نیاز به حداقل دو مانور است.این مانور را میتوان به دو صورت انجام داد. اگر تغییر سرعت در جهت جسم متحرک در مدار باشد باعث تغییر نوع و اندازهٔ مدار ${\displaystyle (a,e)}$ و حضیض ${\displaystyle (\omega ,M)}$ میشود. به صورت همسان اگر تکانه به صورت عمود بر جسم وارد شود، خط گرهها
${\displaystyle (i,\Omega )} $را تغییر میدهد.برای محاسبهٔ سرعت
${\displaystyle \Delta v}$ از طریق تساوی ویز-ویوا سرعت فضاپیما را در نقاط زیر محاسبه میشود.در مدار اولیه ${\displaystyle v_{i}}$، در حضیض مدار هوهمان
${\displaystyle v_{p}}$ در اوج (بیضی) مدار هوهمان ${\displaystyle v_{a}} $و در مدار دومی ${\displaystyle v_{f}}$:
${\displaystyle v_{p}={\sqrt {GM\cdot \left({\frac {2}{r_{p}}}-{\frac {2}{r_{a}+r_{p}}}\right)}}}$
${\displaystyle v_{a}={\sqrt {GM\cdot \left({\frac {2}{r_{a}}}-{\frac {2}{r_{a}+r_{p}}}\right)}}}$
در اینجا G ثابت گرانش و M جرم سیاره میباشد. r مکان اولیه فضاپیما و a طول نیم قطر بزرگ مدار بیضوی است.
برای مدارهای دایره ای کارآمدترین انتقال با انتقال هومان مانور مداری برای انجام انتقال هوهمان از دو ضربه موتور استفاده میشه یکی برای حرکت دادن یک فضاپیما بر روی انتقال مدار و ثانیه ای برای حرکت از آن. یا انتقال دو بیضی به دست میاد .انتقال هومان با شلیک موتورهای موشک یک بار در نقطه خاصی در مدار پایین کار می کند. این شلیک به مدار انرژی می افزاید و سفینه فضایی را از زمین دورتر می کنه و مدار آن را از مداری دایره ای به مداری بیضی شکل تغییر میده
اما کارآمدترین راه برای انتقال بین مدارهای بیضوی چیه
من فرض می کنم در حالت کلی این به راحتی قابل حل نیستش (اگر اشتباه می کنم حتما تذکر بدین ممنونم بچه های هوپا) اما برای حالت کاهش یافته که فقط یک مدار بیضوی است:بنابراین، دلتا-v (Δv) مورد نیاز برای انتقال هومان را می توان با فرض تکانه های آنی به صورت زیر محاسبه کرد:${\displaystyle \Delta v_{1}={\sqrt {\frac {\mu }{r_{1}}}}\left({\sqrt {\frac {2r_{2}}{r_{1}+r_{2}}}}-1\right),}$برای ورود به مدار بیضوی در ${\displaystyle r=r_{1}}$از مدار دایره ای ${\displaystyle r_{1}}$ و
${\displaystyle \Delta v_{2}={\sqrt {\frac {\mu }{r_{2}}}}\left(1-{\sqrt {\frac {2r_{1}}{r_{1} +r_{2}}}}\right),}$
برای خروج از مدار بیضی در ${\displaystyle r=r_{2}}$ به مدار دایرهای ${\displaystyle r_{2}}$ جایی که$ {\displaystyle r_{1 }}$و$ {\displaystyle r_{2}}$ به ترتیب شعاع های مدارهای دایره ای خروج و رسیدن هستند. کوچکتر (بزرگتر) ${\displaystyle r_{1}}$ و ${\displaystyle r_{2}}$ مربوط به فاصله پری آپسیس (فاصله آپوآپسیس) مدار انتقال بیضی هومان است. معمولاً،$ {\displaystyle \mu }$ بر حسب واحد m3/s2 داده میشود، بنابراین حتماً از متر استفاده کنید، نه کیلومتر، برای$ {\displaystyle r_{1}}$ و ${\displaystyle r_{2 }}$ مجموع ${\displaystyle \Delta v}$ پس از آن است:${\displaystyle \Delta v_{\text{total}}=\Delta v_{1}+\Delta v_{2}.}$
طبق قانون سوم کپلر، چه حرکت به مدار بالاتر یا پایینتر، زمان انتقال بین مدارها برابر است.
${\displaystyle t_{\text{H}}={\frac {1}{2}}{\sqrt {\frac {4\pi ^{2}a_{\text{H}}^{3}}{\mu }}}=\pi {\sqrt {\frac {(r_{1}+r_{2})^{3}}{8\mu }}}}$
دو مدار به دور یک جرم مرکزی و دو مدار انتقال احتمالی بین آنها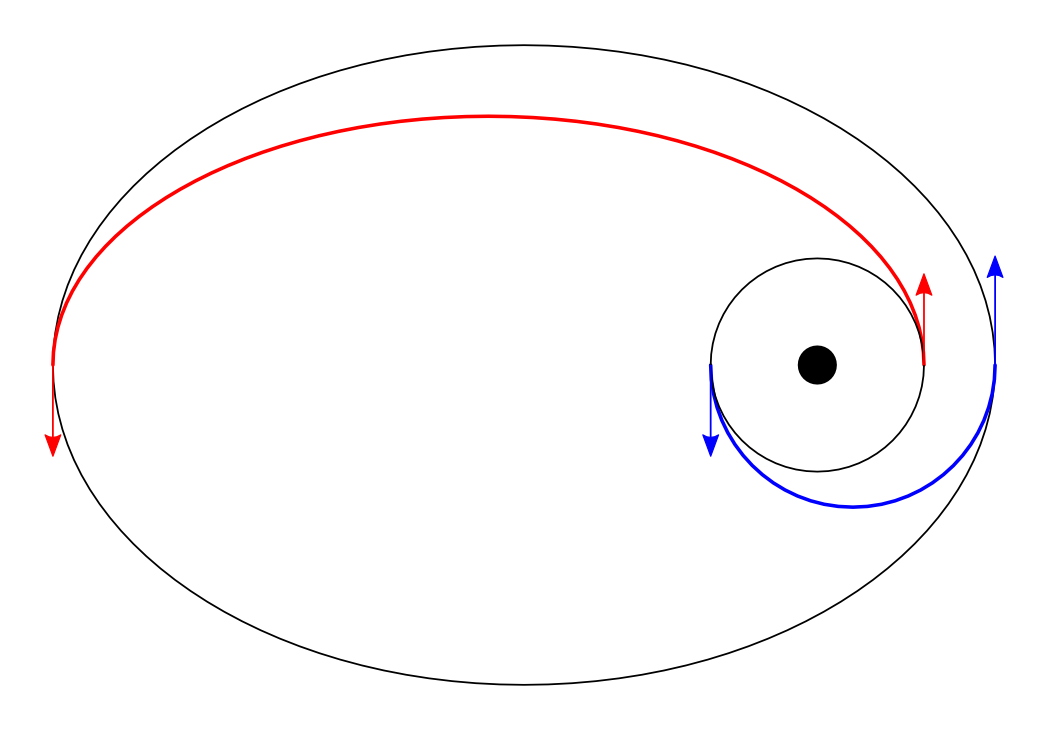
من (به طور شهودی) فرض می کنم که انتقال بهینه یا قرمز یا آبی است، اما من خودم نمی دانم چگونه این را محاسبه کنم.
با جستجوی عنوان سوالم، این دو پیوند را پیدا کردم که احتمالاً به سؤال من پاسخ می دهند، اما در دسترس عموم نیستند و این مقاله اگرچه به نظر می رسد فقط در مورد مدارهای دایره ای صحبت می کند.اعتقاد من این است که انتقال دو مماس بین دو مدار همسطح بهترین است. برای چنین انتقالی، هیچ تغییر جهتی در هنگام خروج یا رسیدن نیاز نیست زیرا بردارهای سرعت در این دو نقطه موازی هستند.
مدار قرمز تصویر بالا مماس بر مدار حرکت دایره ای و همچنین مدار مقصد بیضی شکل است.
در اینجا تصویری از بسیاری از مدارهای انتقال دوگانه ممکن است:
توضیحات تصویر را در اینجا وارد کنید
همانند تصویر قبلی، مدارهای انتقال احتمالی رنگی، مدارهای عزیمت و مقصد سیاه هستند.
برای همه اینها، مجموع Vinfinity خروج و رسیدن بسیار نزدیک به یک مقدار است (اگر حساب من درست باشد).
با این حال، اگر مدار حرکت دایره ای زمین و مدار مقصد بیضی شکل یک سیارک باشد، طولانی ترین انتقال بهترین است. این باعث میشود که قرار ملاقاتی در آفلیون سیارک ایجاد شود. در این مرحله Vinf خروجی در حداکثر و Vinf ورود در حداقل است. اما خروج بزرگ Vinf تا حد زیادی توسط سود Oberth کاهش می یابد زیرا زمین دارای چاه گرانشی عمیق است. بنابراین از دو مداری که نشان میدهید، مدار قرمز کمتر است.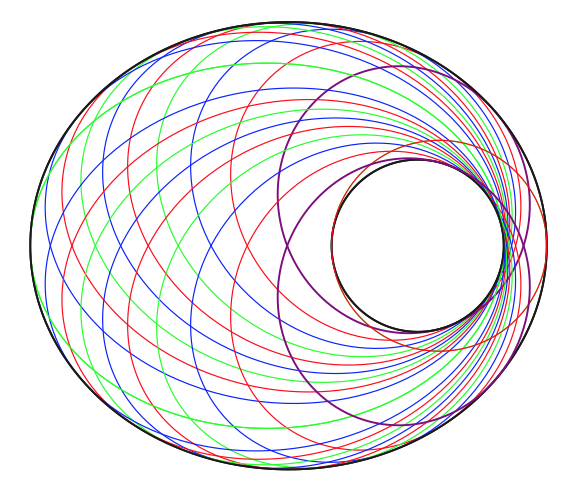
من در مورد این نوع انتقالات در Tangent Ellipses وشتممن پاسخ را به طور قطع نمی دانم، اما حاضرم حدس بزنم که کارآمدترین روش انتقال بین یک مدار دایره ای و یک مدار بیضی شکل، با فرض لحظه ای که آنها همسطح هستند، انتقال تک هومن باقی می ماند.
دلیل این امر این است: به طور اسمی، انتقال هومان شما را از یک مدار دایره ای به مدار دیگر می برد. برای هر نقطه در یک مدار بیضی شکل، یک مدار دایره ای وجود دارد که آن نقطه را با جسمی که در یک جهت حرکت می کند (البته نه با همان سرعت) قطع می کند. انتقال هومن بدین صورت عمل می کند که ابتدا مدار شما را از دایره ای به بیضی تبدیل می کند و سپس به مدار دایره ای باز می گردد.
تغییر گریز از مرکز مدار مستلزم سوختن است که تغییر سرعت مناسب (از جمله نگرش سوختگی) را در نقطه مناسب در مدار ایجاد کند. این کار در انتهای یک مدار انتقال سنتی هومن انجام می شود تا مدار را در فاصله دلخواه از مرکز باری که تبدیل به شعاع مداری جدید ما می شود، دوباره دایره ای کند. هنگامی که مدار ما دایرهای شد، در اصل میتوانیم سوخت دیگری را برای تغییر به مدار بیضی شکل دیگری با محور نیمه اصلی که شعاع مدار دایرهای است اعمال کنیم. با اجازه دادن زمان بین سوختگی ها به 0 و محاسبه مجدد سوختگی دور زدایی دوم بر اساس نقطه جدیدی در مداری که در آن اتفاق می افتد، می توانیم این دو سوختگی را به یک سوختگی تبدیل کنیم.
بنابراین، با تنظیم تکانه چرخش مجدد هومان، باید بتوان مدار انتقال هومن خود را مستقیماً به یک مدار بیضی شکل با شکل دلخواه تبدیل کرد، در حالی که کارایی انتقال هومن (دلتا-v) در قرار گرفتن بین دو مدار دایره ای متناظر را حفظ کرد. .
از همان خط استدلال برمیآید که چه هیچ یک یا هر دوی مدارهای نقطه پایانی درگیر دایرهای یا بیضوی نباشند، این باید به همان اندازه کار کند. (اگر مدار مبدا بیضوی باشد، شما به سادگی، در نقطه ای از اولین سوختگی، فوراً در یک مدار دایره ای قرار می گیرید.)
خب، اول از همه، هر دو فضاپیما باید تو یک صفحه مدار باشن و فاز مدارشون هم باید با هم تطابق داشته باشه. اینجوری میشه ازشون استفاده کرد تا به هم نزدیک بشن.
بعد، وقتی میخوان مدارشون رو تغییر بدن، از چیزی به اسم "مانور" استفاده میکنن. این مانور عبارته از انتقال فضاپیما از یه مدار به مداری دیگه. برای این کار، باید موتورهای فضاپیما روشن بشن تا یه نیرویی به اسم "پیشرانش" ایجاد بشه که باعث تغییر سرعت مداری فضاپیما میشه.
این پیشرانش خیلی زود اتفاق میافته، یعنی تو یه مدت خیلی کوتاهی نسبت به دوره تناوب مدار. در واقع، تغییر شعاع مداری رو نادیده میگیرن.
با فرض اینکه شعاع مدار ثابته و فقط سرعت یا جهت سرعت تغییر میکنه، تکانه زاویهای مدار و انرژی مکانیکی مدار تغییر میکنن که باعث میشه مدار تغییر کنه و یه مانور مداری انجام بشه.
بین همه مانورهای مختلف، بهترین و به صرفهترینش "انتقال هوهمان"ه. این مانور یه مدار بیضیه که به هر دو مدار دایروی مماسه. یعنی حضیض این مدار به اندازه شعاع مدار کوچیکتر و اوجش به اندازه شعاع مدار بزرگتره.
وقتی این مانور رو انجام میدن، دو تا ضربه ایجاد میشه. ضربه اول سفینه رو از مدار اولیه جدا میکنه و به مدار هوهمان منتقلش میکنه. ضربه دوم هم سفینه رو از مدار هوهمان وارد مدار ثانویه میکنه.
مقدار تغییر سرعتی که تو هر مرحله باید توسط موتورهای فضاپیما ایجاد بشه، برابر با اختلاف سرعت دو مدار تو اون نقطه است. به این شکل میشه مدار فضاپیماها رو با دقت بالا تغییر داد و به ملاقات همونطور که میخوان رسید.
خب، در شکل بالا برای اینکه ماهواره از مدار ۱ به مدار ۲ منتقل بشه، باید تو نقطه A یک ضربه به ماهواره وارد بشه. اختلاف سرعتی که این ضربه باید ایجاد کنه، برابره با اختلاف سرعت حضیض مدار هوهمان و سرعت مدار ۱. بعدش ماهواره وارد مدار انتقال هوهمان میشه. تو نقطه B برای اینکه ماهواره از مدار انتقال هوهمان وارد مدار ۲ بشه، باید یه ضربه ایجاد کنیم. اختلاف سرعتی که این ضربه تولید میکنه، برابره با اختلاف سرعت اوج مدار هوهمان و سرعت مدار ۲.
یه نکتهای که باید توجه کنیم اینه که مدت زمان مانور نصف دوره تناوب مدار هوهمانه، چون انتقال تو نیمی از دوره تناوب کامل انجام میشه.
برای داشتن یه مدار کاملا دایروی، باید انرژی مدار دقیقاً یه مقدار مشخص باشه. این موضوع غیر ممکنه چون عدم قطعیتی که تو انجام یه پروژه هست به مراتب بیشتر از دقت انرژی مداره. هر چند، ما باید به دنبال یه انتقال دو ضربهای بین مدارهای بیضی هممحور باشیم. به این نوع مانور مداری "انتقال هوهمان تعمیم یافته" میگیم.
باید به دو نکته زیر توجه کنیم:
محورهای اصلی هر دو بیضی باید کاملاً بر هم تطابق داشته باشن، به طوری که بیضی انتقال تو نقاط اوج یا حضیض به دو مدار مماس باشه.
در شرایط مختلف، دو مدار انتقال هوهمان ممکنه وجود داشته باشه. یکی از اونها از نظر انرژی بهتره. ولی بسته به نیازهای ما، میتونیم از هر دو استفاده کنیم. محاسبات مربوط به اندازه ضربهها هم مثل انتقال هوهمان دایرویه. اندازه تغییر سرعتی که باید به سفینه اعمال کنیم، برابر با اختلاف سرعت در مدار اولیه و مدار هوهمانه.
به عنوان مثال در انتقال شماره ۳، که از حضیض مدار ۱ به اوج مدار ۲ انجام شده، تو این انتقال حضیض مدار هوهمان به حضیض مدار ۱ و اوج مدار هوهمان به اوج مدار ۲ مماسه. اندازه تغییر سرعت اولیه برابر با اختلاف سرعت حضیض مدار هوهمان و حضیض مدار ۱ و اندازه تغییر سرعت دوم برابر با اختلاف سرعت اوج مدار ۲ و اوج مدار ۳ه.
در نهایت باید بگیم که انتقال هوهمان تعمیم یافته میتونه بین مدارهای بیضی و هزلولی یا مدارهای بیضی و سهمی و هر دو مدار دیگهای اتفاق بیفته، به شرط هممحور بودن دو مدار.
حالا مانور تغییر فاز (phasing maneuvers) برای تغییر مکان ماهواره در مدار خودش استفاده میشه.
به عنوان یک مثال، دو تا سفینه توی دورههای مختلف دور زمین گردش میکنن، اما یکی از این سفینهها میتونه با انجام یک حرکت مخصوص خودش رو به سفینه دیگهای که تو مداره، برسونه.
رای انجام این حرکت، اول سفینه یا ماهوارهای که میخوایم مکانش تو مدار تغییر بدیم رو به یه مدار دیگه انتقال میدهیم، به طوری که مدار جدیدش با مدار قبلیش مماس باشه و دوره چرخشش توی اون مدار به شکلی باشه که وقتی به نقطه تماس دو مدار میرسه، نقطه هدف تو مدار اولیه هم به جایگاهش برسه.
برای مثال، فرض کن که یه ماهواره به اسم P داشته باشیم که تو مدار GEO قرار داره. میخوایم این ماهواره رو به نقطه B برسونیم. برای این کار، اول ماهواره رو تو نقطه P با یه ضربه به مدار 2 منتقل میکنیم. دوره چرخش مدار 2 بیشتر از مدار 1ه و باید به شکلی باشه که وقتی ماهواره به نقطه P میرسه، نقطه B تو مدار 1 یه دور کامل به علاوه 12 درجه به جلو حرکت کرده باشه. بعد باز به ماهواره تو نقطه قبلیاش ضربهای وارد میکنیم و اون رو به مدار 1 باز میگردونیم.
یه نکته: اگه بخوایم ماهواره رو به عقب ببریم (مثل ماهوارهای که در شکل بالا 12 درجه به عقب رفته)، باید اون رو به یه مدار ثانویه با دوره چرخشی بیشتر از مدار اولیه منتقل کنیم. اما اگه ماهواره رو به جلو بخوایم ببریم، باید اون رو به مداری با دوره چرخشی کمتر از مدار اولیه منتقل کنیم.
یه نکته دیگه: نقطهای که ضربه اولیه به ماهواره وارد میشه حضیض یا اوج مدار ثانویهاشه.
یه نکته دیگه: در این نوع انتقال، اندازه ضربه اولیه و ثانویه یکسانه چون هر دو ضربه رو تو یه نقطه به ماهواره وارد میکنیم.
یه نکته دیگه: نیازی نیست که ماهواره بعد از یه دور گردش تو مدار ثانویه به نقطه هدف برسه. به عنوان مثال، میتونیم ماهواره رو به مداری منتقل کنیم که بعد از هر دور گردش تو دور زمین، 4 درجه به نقطه هدف نزدیکتر بشه (یعنی دوره چرخش ماهواره با دوره چرخش نقطه هدف به علاوه زمانی که 4 درجه تو مدارش به جلو حرکت میکنه)، بنابراین ماهواره بعد از 3 دور گردش تو مدار انتقال به نقطه هدف میرسه.
برای باراندازی، باید سرعت دو وسیله نقلیهی ما هم منطبق باشه. تعقیبکنندهی ماهواره تو مداری کمی پایینتر از هدف قرار میگیره. در نهایت، با توجه به دو فضاپیما (مثلاً ISS و یک کپسول تامین مجدد بدون سرنشین)، این دو فضاپیما چطور میتونن تو فضا با هم ملاقات کنن؟ اگه با همون سرعت تو فضا حرکت کنن، هیچ وقت به هم نخواهند رسید. اگه کسی بخواد سریعتر حرکت کنه، به مداری بالاتر هدایت میشه. ایا به سادگی یه تفاوت سرعت بسیار جزئی ایجاد میکنن (بنابراین تفاوت ارتفاع خیلی کوچیکی خواهد بود) و سپس منتظر میمونن تا این دو با هم هماهنگ بشن؟
این فرآیند خیلی پیچیده است، چون وقتی نزدیک هدف باشم و سعی کنم به سمتش پیش برم، ممکنه مدارم به سمت دیگهای سیاره منحرف بشه. وقتی سعی میکنم با بالا بردن مدار، زاویه فاز رو تغییر بدم، پیشبینی کردن خیلی دشواره. چون وقتی مدارم از مدار هدف فرق میکنه، زاویه فاز ثابت نمیمونه. اگه اختلاف زاویه فاز زیاد باشه، یا باید خیلی سوخت مصرف کنم که مدارم رو تغییر بدم، یا باید منتظر بمونم تا به هدف برسم. همه اینا خیلی خطاپذیر و زمانبره. بازی KSP قوانین و مقررات واقعی رو الزامی نمیکنه، پس مشکل کمی سادهتره. تا زمانی که بتونم حتی یک تفاوت کوچک در فاز ایجاد کنم، فقط میتونم زمان را افزایش بدم و منتظر بمونم تا هماهنگ بشه. ولی مطمئنم که در واقعیت، فرستادن فضانوردان به فضا و سپس نشستن در مدار برای روزها یا هفتهها و تنظیم دقیق زاویه فازشون با ISS، کاملاً منطقی نیست. پس آژانسهای فضایی چطور ماموریتهای قرار ملاقات خودشون رو برنامهریزی میکنن؟ آیا میتونن به دقت زمان پرتاب رو تخمین بزنن و وقتی مدارها هماهنگ میشن، در مرحله مناسب قرار بگیرن؟ یا آیا یه الگوریتم خوبی برای هماهنگی بهینه مدارها وقتی که قرارها تو مدار هستند، وجود داره؟ اولین قدم برای برنامهریزی یک قرار ملاقات، تعیین فرصتهای راهاندازی و پنجرههای زمانیه. قرار ملاقات مشارکتی شامل یک وسیله نقلیه تعقیبکننده فعال و یک وسیله نقلیه هدف غیرفعال است. اگه وسیله نقلیه تعقیبکننده راهاندازی بشه، مثل همه وسایل نقلیه که اشاره شد، این اتفاق نمیتونه هر زمانی رخ بده.
اولین مرحله برای برنامهریزی قرار ملاقات، تعیین فرصتهای راهاندازی و پنجرههای زمانیه. قرار ملاقات مشارکتی شامل یک وسیله نقلیه تعقیبکننده فعال و یک وسیله نقلیه هدف غیرفعاله. اگه وسیله نقلیه تعقیبکننده راهاندازی بشه، مثل همه وسایل نقلیه که اشاره شد، این اتفاق نمیتونه هر زمانی رخ بده. پرتاب در هر زمان لزوماً مستلزم تغییرات بسیار گرانقیمت هواپیما است.
وقتی پرتاب باعث میشه که تعقیبکننده در همون صفحه مداری وسیله نقلیه مورد نظر قرار بگیره، وسیله نقلیه باید پرتاب شه. این تقریباً دو بار در روز، نزدیک به زمانی که هواپیمای مداری از محل پرتاب عبور میکنه، اتفاق میافته. تعقیبکننده هم باید به گونهای پرتاب کنه که در همون جهت هدف حرکت کنه. این به همراه محدودیتهای پرتاب (مثلاً یک وسیله نقلیه نمیتونه از کیپ به سمت جنوبغربی پرتاب شه) فرصتهای پرتاب دو بار در روز را به یک کاهش میدهد.
کپسولی که داره رو به ایستگاه فضایی بینالمللی میره، برای رسیدن به آداپتور لنگرگاه از سوختگی شعاعی استفاده میکنه. یعنی برای تغییر ارتفاعش، سوختی مصرف میکنه که به سمت یا علیه جهت حرکتش باشه. این کپسول دائماً توی یه مسیر معین داره حرکت میکنه که خطی بین کانون مدارها و کپسول و آداپتور اتصال هست.
فاصله بین این کپسول و ایستگاه فضایی بینالمللی کمه، حدوداً 20 متر، و سرعت نسبی بینشون تقریباً صفره. وقتی کپسول به ایستگاه نزدیک میشه، یعنی در فواصل کوچیکتر، سوختگی شعاعی استفاده میشه که باعث میشه فاصله بین کپسول و ایستگاه افزایش پیدا کنه. این تغییرات خیلی کوچیکه که میشه با استفاده از رانشگرهای کوچیک کنترلشون کرد.
اما وقتی فاصله بزرگتر میشه، یعنی توی فاصله 40 کیلومتری، تأثیر گرانش زمین بیشتر میشه و سوختگی شعاعی کافی نیست. توی این فواصل، باید از روشهای ترانسفر هومن استفاده کنن. یعنی اول با رویکردهایی که به صورت رتروگراد هستن، کپسول باید ارتفاعش رو کم کنه، بعد از اون به سمت ایستگاه حرکت کنه.
به طور کلی، این سوال نشون میده که بسته به فاصله و شرایط مختلف، نیاز به روشهای مختلفی برای تغییر ارتفاع و حرکت داریم.
مدار انتقال hohmann transfer را می توان برای انتقال مدار یک جسم به سمت جسم دیگر استفاده کرد تا زمانی که آنها جسم مشترک و پرجرمتری دارن که به دور آن می چرخند. در زمینه زمین و منظومه شمسی این شامل هر جسمی است که به دور خورشید می چرخد.با تغییر سرعت
v به میزان ${\displaystyle \Delta v}،$ فضاپیما وارد مدار جدیدی میشود، که دارای نقطهٔ مشترک r با مدار قدیمی است. به همین دلیل فقط سه عنصر مداری تغییر میکنند ( سه ترکیب خطی از عنصرهای مداری غیر وابسته)، در حالی که دیگر عناصر ثابت میمانند. برای تغییر هر شش عنصر مداری نیاز به حداقل دو مانور است.این مانور را میتوان به دو صورت انجام داد. اگر تغییر سرعت در جهت جسم متحرک در مدار باشد باعث تغییر نوع و اندازهٔ مدار ${\displaystyle (a,e)}$ و حضیض ${\displaystyle (\omega ,M)}$ میشود. به صورت همسان اگر تکانه به صورت عمود بر جسم وارد شود، خط گرهها
${\displaystyle (i,\Omega )} $را تغییر میدهد.برای محاسبهٔ سرعت
${\displaystyle \Delta v}$ از طریق تساوی ویز-ویوا سرعت فضاپیما را در نقاط زیر محاسبه میشود.در مدار اولیه ${\displaystyle v_{i}}$، در حضیض مدار هوهمان
${\displaystyle v_{p}}$ در اوج (بیضی) مدار هوهمان ${\displaystyle v_{a}} $و در مدار دومی ${\displaystyle v_{f}}$:
${\displaystyle v_{p}={\sqrt {GM\cdot \left({\frac {2}{r_{p}}}-{\frac {2}{r_{a}+r_{p}}}\right)}}}$
${\displaystyle v_{a}={\sqrt {GM\cdot \left({\frac {2}{r_{a}}}-{\frac {2}{r_{a}+r_{p}}}\right)}}}$
در اینجا G ثابت گرانش و M جرم سیاره میباشد. r مکان اولیه فضاپیما و a طول نیم قطر بزرگ مدار بیضوی است.
برای مدارهای دایره ای کارآمدترین انتقال با انتقال هومان مانور مداری برای انجام انتقال هوهمان از دو ضربه موتور استفاده میشه یکی برای حرکت دادن یک فضاپیما بر روی انتقال مدار و ثانیه ای برای حرکت از آن. یا انتقال دو بیضی به دست میاد .انتقال هومان با شلیک موتورهای موشک یک بار در نقطه خاصی در مدار پایین کار می کند. این شلیک به مدار انرژی می افزاید و سفینه فضایی را از زمین دورتر می کنه و مدار آن را از مداری دایره ای به مداری بیضی شکل تغییر میده
اما کارآمدترین راه برای انتقال بین مدارهای بیضوی چیه
من فرض می کنم در حالت کلی این به راحتی قابل حل نیستش (اگر اشتباه می کنم حتما تذکر بدین ممنونم بچه های هوپا) اما برای حالت کاهش یافته که فقط یک مدار بیضوی است:بنابراین، دلتا-v (Δv) مورد نیاز برای انتقال هومان را می توان با فرض تکانه های آنی به صورت زیر محاسبه کرد:${\displaystyle \Delta v_{1}={\sqrt {\frac {\mu }{r_{1}}}}\left({\sqrt {\frac {2r_{2}}{r_{1}+r_{2}}}}-1\right),}$برای ورود به مدار بیضوی در ${\displaystyle r=r_{1}}$از مدار دایره ای ${\displaystyle r_{1}}$ و
${\displaystyle \Delta v_{2}={\sqrt {\frac {\mu }{r_{2}}}}\left(1-{\sqrt {\frac {2r_{1}}{r_{1} +r_{2}}}}\right),}$
برای خروج از مدار بیضی در ${\displaystyle r=r_{2}}$ به مدار دایرهای ${\displaystyle r_{2}}$ جایی که$ {\displaystyle r_{1 }}$و$ {\displaystyle r_{2}}$ به ترتیب شعاع های مدارهای دایره ای خروج و رسیدن هستند. کوچکتر (بزرگتر) ${\displaystyle r_{1}}$ و ${\displaystyle r_{2}}$ مربوط به فاصله پری آپسیس (فاصله آپوآپسیس) مدار انتقال بیضی هومان است. معمولاً،$ {\displaystyle \mu }$ بر حسب واحد m3/s2 داده میشود، بنابراین حتماً از متر استفاده کنید، نه کیلومتر، برای$ {\displaystyle r_{1}}$ و ${\displaystyle r_{2 }}$ مجموع ${\displaystyle \Delta v}$ پس از آن است:${\displaystyle \Delta v_{\text{total}}=\Delta v_{1}+\Delta v_{2}.}$
طبق قانون سوم کپلر، چه حرکت به مدار بالاتر یا پایینتر، زمان انتقال بین مدارها برابر است.
${\displaystyle t_{\text{H}}={\frac {1}{2}}{\sqrt {\frac {4\pi ^{2}a_{\text{H}}^{3}}{\mu }}}=\pi {\sqrt {\frac {(r_{1}+r_{2})^{3}}{8\mu }}}}$
دو مدار به دور یک جرم مرکزی و دو مدار انتقال احتمالی بین آنها
من (به طور شهودی) فرض می کنم که انتقال بهینه یا قرمز یا آبی است، اما من خودم نمی دانم چگونه این را محاسبه کنم.
با جستجوی عنوان سوالم، این دو پیوند را پیدا کردم که احتمالاً به سؤال من پاسخ می دهند، اما در دسترس عموم نیستند و این مقاله اگرچه به نظر می رسد فقط در مورد مدارهای دایره ای صحبت می کند.اعتقاد من این است که انتقال دو مماس بین دو مدار همسطح بهترین است. برای چنین انتقالی، هیچ تغییر جهتی در هنگام خروج یا رسیدن نیاز نیست زیرا بردارهای سرعت در این دو نقطه موازی هستند.
مدار قرمز تصویر بالا مماس بر مدار حرکت دایره ای و همچنین مدار مقصد بیضی شکل است.
در اینجا تصویری از بسیاری از مدارهای انتقال دوگانه ممکن است:
توضیحات تصویر را در اینجا وارد کنید
همانند تصویر قبلی، مدارهای انتقال احتمالی رنگی، مدارهای عزیمت و مقصد سیاه هستند.
برای همه اینها، مجموع Vinfinity خروج و رسیدن بسیار نزدیک به یک مقدار است (اگر حساب من درست باشد).
با این حال، اگر مدار حرکت دایره ای زمین و مدار مقصد بیضی شکل یک سیارک باشد، طولانی ترین انتقال بهترین است. این باعث میشود که قرار ملاقاتی در آفلیون سیارک ایجاد شود. در این مرحله Vinf خروجی در حداکثر و Vinf ورود در حداقل است. اما خروج بزرگ Vinf تا حد زیادی توسط سود Oberth کاهش می یابد زیرا زمین دارای چاه گرانشی عمیق است. بنابراین از دو مداری که نشان میدهید، مدار قرمز کمتر است.
من در مورد این نوع انتقالات در Tangent Ellipses وشتممن پاسخ را به طور قطع نمی دانم، اما حاضرم حدس بزنم که کارآمدترین روش انتقال بین یک مدار دایره ای و یک مدار بیضی شکل، با فرض لحظه ای که آنها همسطح هستند، انتقال تک هومن باقی می ماند.
دلیل این امر این است: به طور اسمی، انتقال هومان شما را از یک مدار دایره ای به مدار دیگر می برد. برای هر نقطه در یک مدار بیضی شکل، یک مدار دایره ای وجود دارد که آن نقطه را با جسمی که در یک جهت حرکت می کند (البته نه با همان سرعت) قطع می کند. انتقال هومن بدین صورت عمل می کند که ابتدا مدار شما را از دایره ای به بیضی تبدیل می کند و سپس به مدار دایره ای باز می گردد.
تغییر گریز از مرکز مدار مستلزم سوختن است که تغییر سرعت مناسب (از جمله نگرش سوختگی) را در نقطه مناسب در مدار ایجاد کند. این کار در انتهای یک مدار انتقال سنتی هومن انجام می شود تا مدار را در فاصله دلخواه از مرکز باری که تبدیل به شعاع مداری جدید ما می شود، دوباره دایره ای کند. هنگامی که مدار ما دایرهای شد، در اصل میتوانیم سوخت دیگری را برای تغییر به مدار بیضی شکل دیگری با محور نیمه اصلی که شعاع مدار دایرهای است اعمال کنیم. با اجازه دادن زمان بین سوختگی ها به 0 و محاسبه مجدد سوختگی دور زدایی دوم بر اساس نقطه جدیدی در مداری که در آن اتفاق می افتد، می توانیم این دو سوختگی را به یک سوختگی تبدیل کنیم.
بنابراین، با تنظیم تکانه چرخش مجدد هومان، باید بتوان مدار انتقال هومن خود را مستقیماً به یک مدار بیضی شکل با شکل دلخواه تبدیل کرد، در حالی که کارایی انتقال هومن (دلتا-v) در قرار گرفتن بین دو مدار دایره ای متناظر را حفظ کرد. .
از همان خط استدلال برمیآید که چه هیچ یک یا هر دوی مدارهای نقطه پایانی درگیر دایرهای یا بیضوی نباشند، این باید به همان اندازه کار کند. (اگر مدار مبدا بیضوی باشد، شما به سادگی، در نقطه ای از اولین سوختگی، فوراً در یک مدار دایره ای قرار می گیرید.)
