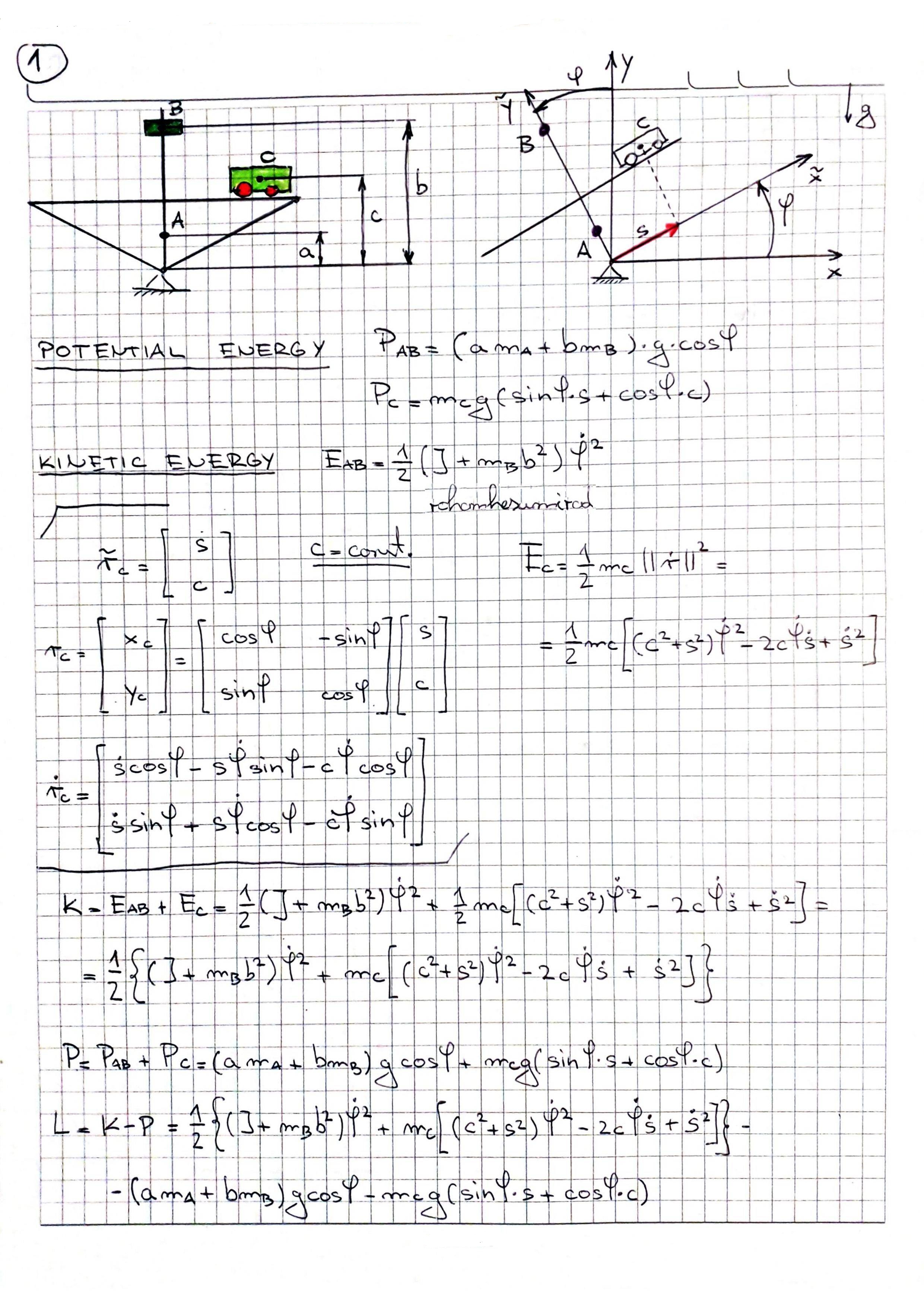
کاری که من باید انجام دهم این است که معادلات حرکت و نمایش فضای حالت این سیستم را استخراج کنم و همه آن را برای مدل سازی این سیستم در متلب قرار دهم.
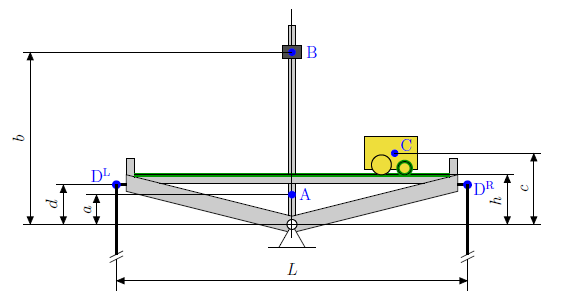
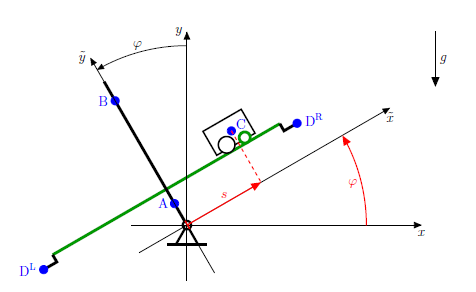
دو شکل زیر مدل توصیف شده را نشان می دهد، که دومی یک مدل ساده تر از مدل الاکلنگ است.
پارامترهای ثابت سیستم لازم برای مدل سازی دینامیک سیستم به شرح زیر است:
ارتفاع مرکز جرم آونگ، به استثنای وزن B (یعنی نقطه A در شکل = مرکز جرم قسمتهای سایهدار خاکستری روشن)،
b موقعیت وزن B بر روی میله عمودی) وزن یک جرم نقطه متمرکز در نقطه B مدل شده است.
d ارتفاع نقاط اتصال طناب هایی که چند آونگ را به هم وصل می کنند (این موضوع به مشکل داده شده بی ربط است زیرا من می خواهم سیستم را برای یک آونگ منفرد مدل کنم)
ج ارتفاع مرکز جرم گاری (نقطه C در شکل)،
h ارتفاع قفسه برای رانش گاری،
گشتاور J اینرسی آونگ، به استثنای وزن B،
متر مربع جرم آونگ، به استثنای وزن B،
متر مربع جرم وزن در نقطه B،
مترمکعب جرم گاری.
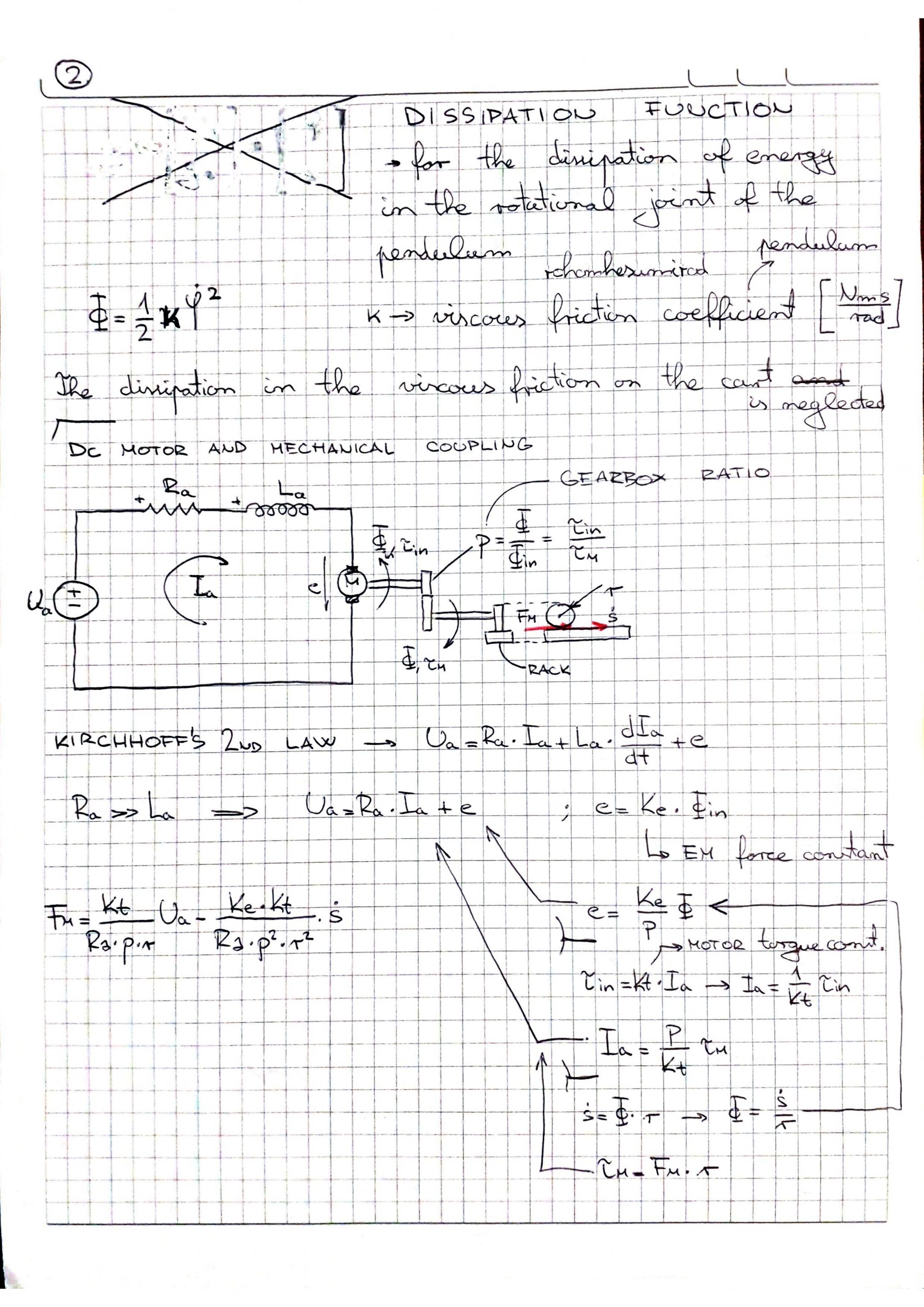
چرخ دستی توسط یک موتور DC هدایت می شود.