روند زیر بهترین توصیف یک موتور توربوفن را دارد. برای اطلاعات در مورد تفاوت با موتورهای توربوپراپ .
این بدان معنی است که هیچ منبع هوای خونساز برای تأمین استارت توربین هوا وجود ندارد. این می تواند به این معنی باشد که همه موتورها خاموش هستند و APU در دسترس نیست ، یا فقط این است که دریچه های خروجی به موتور خاموش بسته شده اند و نمی توانند باز شوند.
تعدادی موتور توربین وجود دارد که به روشی متفاوت راه اندازی می شوند. ما در مورد موتورهای توربوپراپ یا توربوشفت صحبت می کنیم.
این موتورها از دو قسمت ژنراتور گاز و توربین برق آزاد تشکیل شده اند. ژنراتور گاز تقریباً یک موتور جت است. از ورودی ، کمپرسور ، محفظه احتراق و توربین تشکیل شده است. ، در موتور توربوشفت از اگزوز به هیچ وجه برای تولید رانش استفاده نمی شود بنابراین برخی از آنها حتی وارونه هستند (کمپرسور در قسمت عقب موتور ، اما هنوز هم از هوا از ورودی به جلو تغذیه می شود). شاید متوجه شده باشید که در بعضی از هواپیماهای توربوشفت خروجی اگزوز بسیار نزدیک به پایه است - دلیل آن این است.
مولفه دوم یک توربین قدرت آزاد است که توسط اگزوز ژنراتور گاز رانده می شود و پروانه را از طریق جعبه دنده کاهش می دهد . در اکثر موتورها این اجزا فقط توسط کیس موتور به هم چسبیده اند ، به همین دلیل به آن توربین قدرت آزاد می گویند.
اکنون همه ما یک ایده اولیه از این نوع موتور داریم و می توانیم در مورد توالی شروع صحبت کنیم. به اصطلاح ژنراتور استارتر به ژنراتور گاز متصل می شود. در واقع این یک موتور الکتریکی است که توسط باتری (یا هر منبع تغذیه DC دیگر) تأمین می شود و برای میل لنگ شافت ژنراتور استفاده می شود. پس از روشن شدن موتور ، این موتور می تواند به عنوان ژنراتور تحویل دهنده برق DC مورد استفاده قرار گیرد. اگر به اصول یک موتور الکتریکی و یک ژنراتور DC نگاه کنید می بینید که از نظر فنی یکسان هستند. فقط باید برخی از اتصالات را تغییر دهید. این کار معمولاً با بهره گیری از سوئیچ سه حالته راکد 'start-off-generator' انجام می شود.
توالی شروع تقریباً مشابه موتور جت است:
شافت ژنراتور گاز را با استارت لنگ بزنید
با سرعت چرخش خاص (معمولاً 10-15٪) سوخت اضافه کنید
پارامترهای موتور را کنترل کنید
به ژنراتور بروید
معمولاً توربین قدرت آزاد خیلی زود پس از افزودن سوخت شروع به چرخاندن ملخ می کند ، به هر حال بعضی از موتورها مجهز به ترمز پروانه هستند که از چرخش قسمت توربین برق آزاد جلوگیری می کند. این فقط برای به دست آوردن نیروی الکتریکی یا هیدرولیکی ، بعضاً پنوماتیک - نوعی APU - کار می کند
بسیاری از آنها ، اگر نگوییم بیشتر توربوپروپ ها دارای نازل هایی برای ایجاد مقداری رانش جت هستند. این به دلیل بهره وری پروپ است که 100٪ نیست. به عنوان اولین تقریب ، بهترین (طراحی) نسبت نیروی محرکه در مقابل جت رانش همان بازده prop در کروز است ، به طور معمول در حدود 85/15. برای هلیکوپترها این داستان دیگری است ، بنابراین در توربوشه ها آنها به طور معمول تمام فشار را برای چرخش شافت مصرف می کنند ، حتی گاهی اوقات بیش از حد گاز را گسترش می دهند. این نیاز به نازل انبساط بزرگتری دارد که می توانید آن را در بسیاری از هلی کوپترها مشاهده کنید. -
برای راه اندازی هواپیما:
موتور اصلی از جعبه دنده خارج شده است
JFS به گیربکس چسبیده است
فشار هیدرولیک از یک باتری به یک پمپ منتقل می شود و باعث می شود که آن به عنوان یک موتور هیدرولیکی کار کند ، که گیربکس را می چرخاند
جعبه دنده چرخشی JFS را تا حدی می چرخاند که به سرعت شروع برسد
سوخت به JFS خورانده می شود ، جرقه زنی آتش می گیرد و شروع می شود
JFS با سرعتی بالا ، حدود 200 اسب بخار قدرت تولید می کند
وقتی JFS کاملاً شیب دارد ، کلاچ شافت موتور درگیر می شود
شافت چرخش موتور اصلی را می چرخاند تا زمانی که به سرعت شروع برسد
هنگامی که موتور اصلی به سرعت خاصی رسید ، JFS از جعبه دنده جدا شده و خاموش می شود
موتور در حال چرخش ژنراتورها و هیدرولیک را به صورت آنلاین وارد می کند ، فشار بار در باتری ها را برای بار دیگر که لازم است شروع شود دوباره شارژ می کند
از برخی جهات ، این شبیه بولدوزر یا سایر تجهیزات سنگین است. بسیاری از آنها دارای یک "موتور پونی" کوچک با یک استارت الکتریکی هستند که سپس ترکیب قدرت / گشتاور لازم برای راه اندازی موتور اصلی را تولید می کند. پس از روشن شدن موتور اصلی ، موتور پونی از کار می افتد و خاموش می شود.
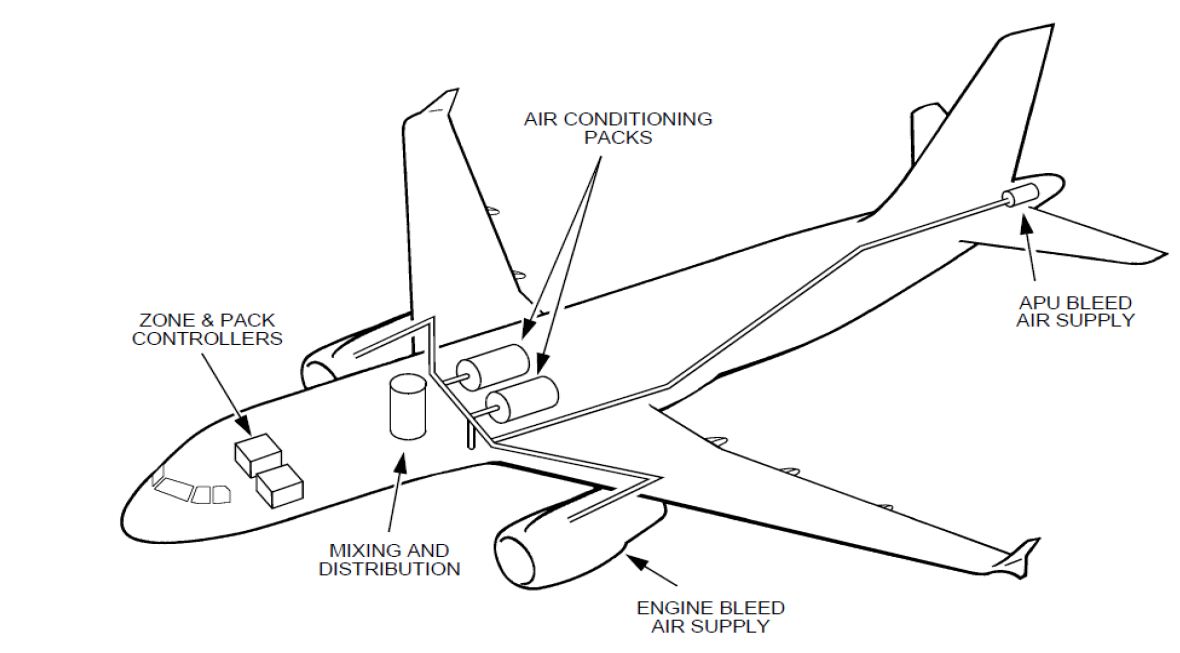
APU یک گیربکس را فعال می کند که دارای یک ژنراتور ، پمپ هیدرولیک و یک شافت خروجی برای شروع موتور به موتور است. همچنین از طریق یک شافت ، که دارای پمپ هیدرولیک ، ژنراتور و شافت خروجی است ، به یک گیربکس دیگر در موتور شماره 2 متصل می شود. بنابراین APU یا هر دو موتور می تواند کار کند ،
، تا موتور بتواند به استارت کمک کند تا آن را به دور خود برساند. حداقل دور دور در دقیقه وجود دارد زیرا شما برای کنترل شعله و به همین دلیل دما را به کمترین جریان جرمی می برید که به درون قوطی مشعل می رود (بنابراین این موتورها "هوا خنک می شوند") و اکثر جریان جرمی در حال سوختن نیست ، بلکه برای حاوی مرزهای شعله استفاده می شود - بعضی از شعله ها باعث می شوند که در هنگام شروع دوباره به سمت توربین برگردد ، همانطور که می بینید ITT افزایش می یابد ، اما باید حداقل شود و هرچه جرم بیشتری جریان یابد بهتر است).
شما می توانید معرفی سوخت را به خوبی از حداقل RPM به تأخیر بیندازید
اگزوز خفه شده و انبساط کامل:
با یک لوله اگزوز همگرا ، رانش موتور جت در سرعت صدای جریان گاز خروجی به حداکثر می رسد.
سرعت جریان گاز اگر در ورودی لوله صوتی باشد ، افزایش می یابد. در یک نازل همگرا حداکثر سرعت خروجی گاز M = 1 است ، سرعت صدا در دمای گاز خروجی گرم. با یک اگزوز خفه شده ، در M = 1 در خروجی اگزوز ، فشار استاتیک بالاتر از فشار محیط است.
سطح خروجی باید کاهش یابد تا زمانی که سرعت خروج گاز M = 1 باشد ، . فشار در خروجی اگزوز سپس:
$p_e =\frac {\dot{m}\cdot R \cdot T_e}{V_e \cdot A_e } $
که بیشتر از فشار محیط است پ0.
رانش خالص F از یک موتور جت خالص است
$ F = \dot{m} * (V_e - V_0) + A_e * (p_e - p_0) $
Rثابت گاز است پارامترهایی که باید بدانید:
جریان جرم خروجی از توربین متر˙ در کیلوگرم در ثانیه
دمای خروجی گاز تیه در ºK
سرعت صدا در تیه در m / s ، که برای یک اگزوز خفه شده برابر است Vه
منطقه خروجی آه که در متر2
سرعت هوا V0 که در متر بر ثانیه و فشار محیط پ0 که در ن/متر2
2. انبساط کامل
مشابه مورد اگزوز خفه شده:$ A_e =\frac {\dot{m}\cdot R \cdot T_e}{V_e \cdot p_e }$
رانش خالص در این حالت بسیار کمتر است زیرا فشار خروج توربین نسبت به حالت خفه شده کمتر است و بنابراین قدرت پیشرانه موتور جت کمتر است. معمولاً در مورد توربوجت فشار اگزوز توربین استپتیتی خیلی بالاتر از εk r*p0، که منجر به حالت اگزوز خفه شده در بالا می شود.
توربوفن ها با نسبت بای پس بالا به اندازه کافی پایین هستند پتیتی برای امکان انبساط کامل ، بیشتر انرژی تولید کننده گاز برای فشرده سازی هوا بای پس استفاده می شود.
گاز مشتعل توربین را می چرخاند؟
.اکنون هوای احتراق با سرعت بالا که از محفظه های احتراق خارج می شود توربین را به حرکت در می آورد. توربین شافت را به حرکت در می آورد ، شافت کمپرسور را به حرکت در می آورد ، کمپرسور محفظه احتراق را با هوای فشرده تغذیه می کند و تا زمانی که سوخت در اتاق ها جریان دارد این چرخه ادامه و روشن می شود.
در اینجا نمودار چگونگی "حرکت دادن" توربین آورده شده است. فلش های قرمز نشان می دهد که جریان هوا از نازل ها به سمت پره های توربینی تکانه چگونه هدایت می شود.
پره های استاتور همگرا بوده و هوای وارد شده از نازل های حاصل شتاب می گیرد. همانطور که هوای شتاب دار روی پره های روتور خمیده تأثیر می گذارد ، باعث ایجاد نیروهایی آیرودینامیکی بر روی آنها می شود ، مانند آنچه در بال ایجاد می شود (همانطور که دیگران قبلاً گفته اند). این نیروها توربین را به حرکت در می آورند.
توربین به ماشینی گفته می شود که از مایعات در حال حرکت انرژی گرفته و آن را به کار تبدیل می کند. در پره های توربین ، هوا منبسط می شود ، که باعث تولید کار می شود. از بسیاری جهات ، توربین ها نقطه مقابل کمپرسورها هستند.
توربین واکنش
" توربین واکنش دو مرحله ای .
توربین های مورد استفاده در هواپیماها توربین های جریان محوری هستند که چندین مرحله را برای استخراج کار از هوای خارج شده از محفظه احتراق به کار می گیرند.
توربین ها دارای دو قسمت هستند - نازل های ثابت (یا استاتورها) و روتورهای متحرک. هدف از نازل ها چرخاندن جریان ورودی به گونه ای است که در زاویه صحیح به روتورها برخورد کند ، در حالی که کار واقعی توسط روتورها از مایع خارج می شود.
مثلث سرعت
" مثلث سرعت برای یک مرحله توربین محوری .
در واقع ، چرخان ها توسط مایع ورودی چرخانده می شوند ، همانطور که در بالا نشان داده شده است و برای چرخش شافت (که کمپرسور را کار می کند) کار می کند. در مورد موتورهای توربوجت (و تا حدی توربوفن) ، فشار هوا کاهش می یابد ، در حالی که سرعت افزایش می یابد. این رانش لازم را فراهم می کند.
مکانیزم اصلی چرخش پره های توربین این است که جریان باعث می شود تا پره های روتور با برخورد به آنها ، بیش از هرگونه بالابر تولید شده ، چرخانده شود.
ین اولین توربین سریعترین چرخش را انجام می دهد و بیشترین انرژی را از جریان گاز برداشت می کند. این امر به نظر ناکارآمد می رسد وقتی که شما می خواهید توان خروجی از توربین قدرت را به حداکثر برسانید. ؟
شما فقط می توانید برای نیروی اسب شافت از آنچه در دسترس است پس از کم شدن انرژی برای حرکت کمپرسور استفاده کنید. این تفریق توسط توربین فشار قوی انجام می شود. هر انرژی باقی مانده در جریان خروجی پس از آن می تواند برای هدایت پروانه ، فن یا ژنراتور استخراج شود.
كمپرسور كندتر نسبت تراکم را پايين آورده و در نتيجه به اقتصاد سوخت موتور صدمه مي زند.
یک توربین آزاد سریعتر به یک گیربکس تقویتی بسیار بزرگتر و بزرگتر احتیاج دارد (یادتان باشد که چرخش موتور بسیار کندتر از توربین است).
راهی آسان برای اجرای شفت های متحدالمرکز (یا غیر از این) از طریق HPT (تصویر بالا) برای اجرای LPC (یا پایه) وجود ندارد.
با فرض اینکه این کار انجام شود ، تنظیم جریان سوخت دارای پاسخ کمپرسور کندتری خواهد بود ، در نتیجه باعث گرم شدن بیش از حد (هوای کافی) یا خفگی توربین (هوای زیاد اما سوخت کافی) نمی شود.
به طور خلاصه ، جریان گاز فقط به این دلیل است که کمپرسور توسط اولین مرحله توربین کار می کند.
نسبت فشار کمپرسور بالاتر منجر به رانش بالاتر و TSFC پایین تر می شود
$ (TSFC-\pi_c) $
TSFC
: با افزایش نسبت فشار کمپرسور ، جریان مخلوط شده و با کارایی بیشتری در محفظه احتراق می سوزد ، بنابراین انرژی موجود برای نازل برای تسریع جریان افزایش می یابد. از آنجا که رانش جت با سرعت خروجی افزایش می یابد ، می توان اطمینان داشت که نسبت فشار بالاتر به رانش بالاتر تبدیل خواهد شد. $ TSFC=\dot{m}_f/F $ رفتار با عکس متناسب خواهد بود
زیرا خطوط فشار ثابت با افزایش آنتالپی متفاوت هستند.

نگاهی به نمودار مناسب بیندازید. دو خط خط فشار ثابت هستند و خط بالاتر نشان دهنده فشار بالاتر است و همانطور که مشاهده می کنید واگرا هستند.
1 شروع چرخه است ، بنابراین در دمای محیط
از 1 به 2 ، دما را افزایش می دهیم و به فشار بیشتری در کمپرسور می رویم. هزینه این کار مقداری انرژی است که توسط توربین تحویل می شود.
با افزودن انرژی از 2 به 3 دما را در همان فشار افزایش می دهیم.
از 3 به 4 ، دما و فشار توربین را کاهش می دهیم (و مقداری از انرژی استخراج شده را برای هدایت توربین استفاده می کنیم)
از 4 به 1 ، ما از انرژی موجود در جریان استفاده می کنیم تا خود را به پیش ببرد و دوباره به دمای محیط برمی گردیم.
در اصل ما می توانیم فشار بالاتر را نیز رد کنیم و به سادگی از 1 به 4 و دوباره به 1 برویم (این فقط گرم کردن هوا است و خودتان را با گرما می رانید).
اما با حرکت به سمت فشار بالاتر می توانیم از خطوط فشار واگرا استفاده کنیم. این به ما سود می دهد زیرا فاصله 3-4 بزرگتر از 2-1 است. این بدان معناست که اگر از توربین برای هدایت کمپرسور استفاده کنیم ، مقداری انرژی "آزاد" بدست خواهیم آورد.
برای نشان دادن نقطه "انرژی آزاد" ، به تصویر زیر نگاه کنید ، در اینجا دو ایستگاه اضافی ورودی اضافه شده است که در حال حاضر چندان مهم نیست و نازل. توجه داشته باشید که فاصله های عمودی کمپرسور و توربین برابر است (باید باشد ، زیرا یکی دیگری را هدایت می کند) ، بنابراین
$ \begin{aligned}P_{comp} = P_{turb} &\Rightarrow \Delta T_{comp} = \Delta T_{turb} \\ &\Rightarrow (T_3 - T_2) = (T_4 - T_5) \end{aligned}$
اما به دلیل واگرایی بودن خطوط ، انرژی اضافی برای ما باقی مانده است. ما از نازل برای گسترش بهینه فشار بالا ، جریان دمای بالا و استخراج انرژی "اضافی" استفاده می کنیم.




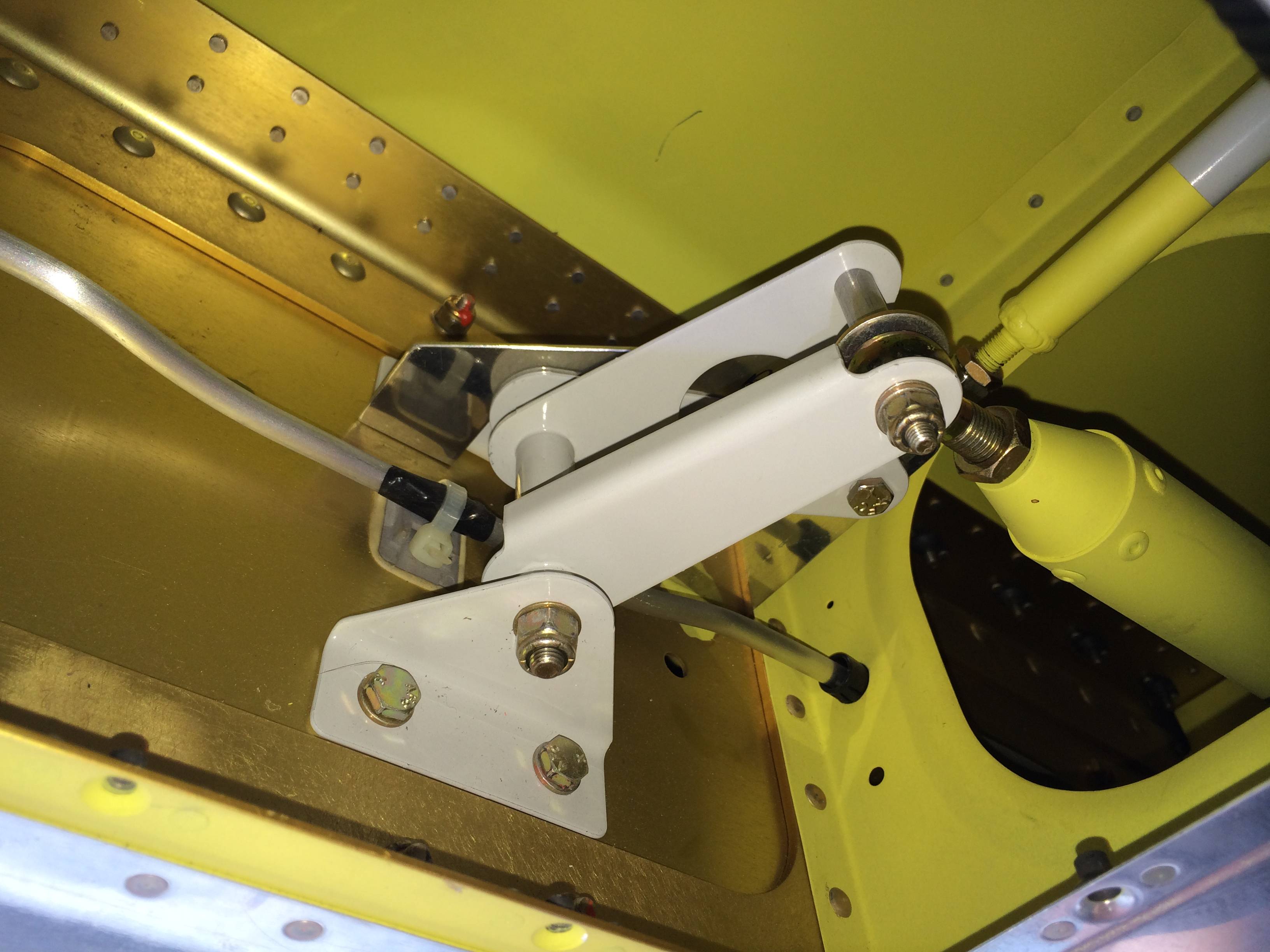
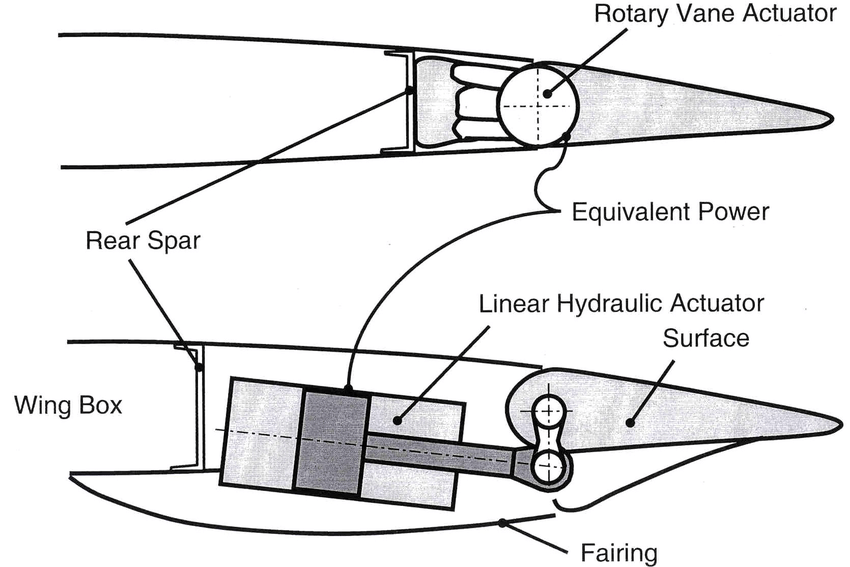 شما معمولاً بوق کنترل واقعی را در هواپیماهای اندازه کامل نمی بینید، زیرا یا به عنوان یک فیرینگ برای ساده کردن آن پوشانده می شود، یا در ضخامت ساختار بال قرار می گیرد.
شما معمولاً بوق کنترل واقعی را در هواپیماهای اندازه کامل نمی بینید، زیرا یا به عنوان یک فیرینگ برای ساده کردن آن پوشانده می شود، یا در ضخامت ساختار بال قرار می گیرد.