علامت گشتاور را برای یک سیستم چرخ دنده سیاره ای تعیین کنید
ارسال شده: جمعه ۱۴۰۱/۷/۱۵ - ۰۸:۳۲
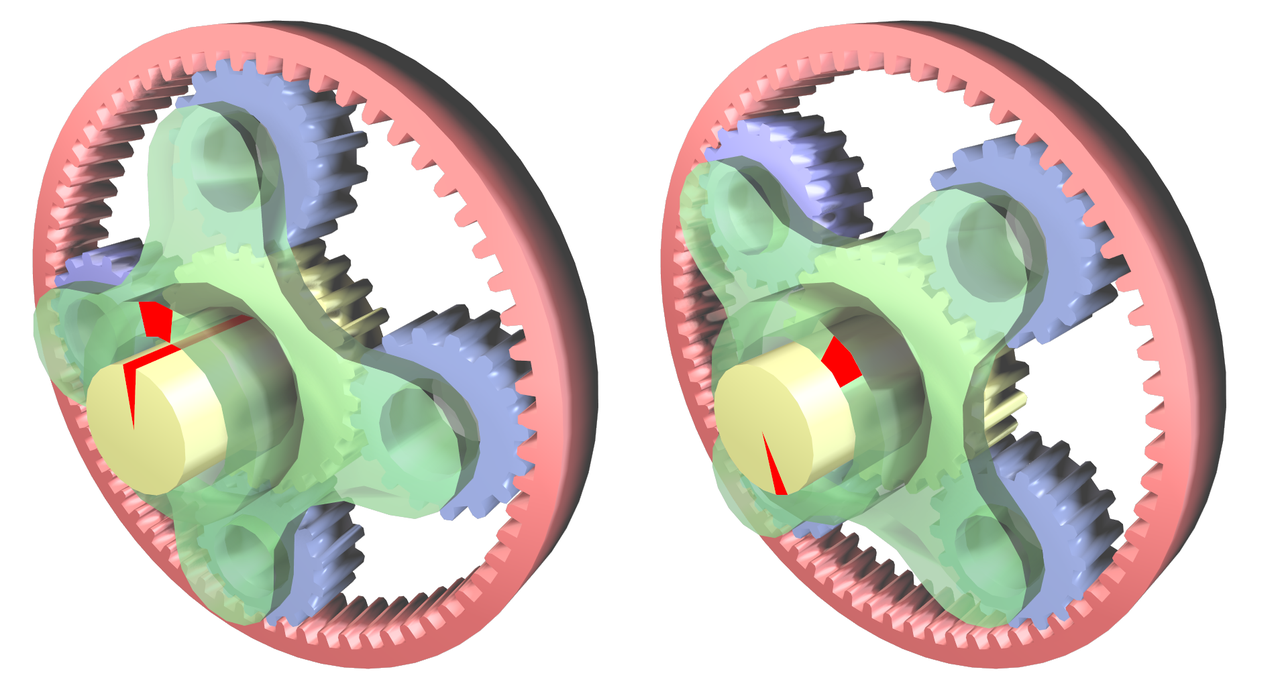
من سعی می کنم توزیع توان یک سیستم چرخ دنده سیاره ای،
برای یافتن توان خروجی، باید گشتاور حلقه های 5 و 6 را پیدا کنم. گشتاور و سرعت زاویه ای خورشید 1 مشخص است. همچنین من تمام سرعت های زاویه ای دیگر را دارم. من سعی می کنم روشی برای طراحی نمودار بدن آزاد این سیستم پیدا کنم.
اگر علامت مثبت در جهت عقربه های ساعت باشد، چگونه می توانم گشتاور T5 و T6 را به این نمودار بدنه آزاد اضافه کنم؟
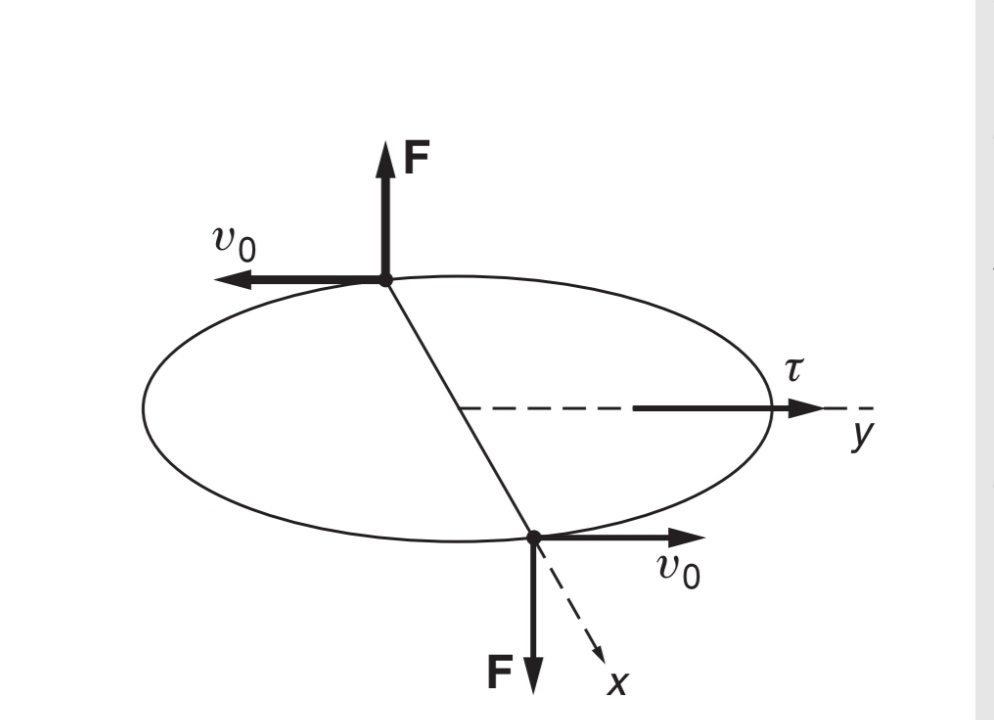
در این پاسخ، من از قرارداد علامت استفاده میکنم که گشتاورها و سرعتهای زاویهای در صورتی مثبت هستند که جهت آنها به سمت راست باشد (چپ نیز جایگزینی به همان اندازه معتبر برای این پاسخ خواهد بود) با استفاده از قانون دست راست، یعنی در جهت عقربههای ساعت دیده شود. اگر از سمت چپ نگاه کنید هر چرخ دنده ای که در جهت مخالف بچرخد سرعت زاویه ای منفی خواهد داشت.
رویکرد تعادلی
یک روش برای تعیین گشتاور در هر چرخ دنده ترسیم نمودار بدنه آزاد یک چرخ دنده با تمام نیروها (دنده های مشبک، واکنش شفت) و گشتاورهای خارجی (گشتاور شفت) اعمال شده بر روی آن چرخ دنده است. سپس با نادیده گرفتن نیروهای اینرسی، از تعادل برای نوشتن عبارتی در رابطه با نیروهای ناشناخته دندان و گشتاورهای خارجی استفاده کنید. نمونه ای از این کار برای چرخ دنده ای که با علامت 1 مشخص شده است انجام می شود:
توجه داشته باشید که جهت نیروها کاملا دلخواه است،
با اعمال تعادل، و حذف نیروی شفت (فقط به نیروهای دنده و گشتاورهای خارجی علاقه مند است)، به دست می آوریم:
$F_{II} = T_{in}/r_1$
که در آن r1 شعاع گام چرخ دنده (تقریبا) یا فاصله از مرکز دنده تا خط فشار است (دقیق است، اما اگر در نهایت به گشتاورهای خارجی علاقه مند هستید، لازم نیست). با تکرار این کار برای همه دندهها، میتوان گشتاورهای خارجی را به یکدیگر مرتبط کرد و نسبتهای هر یک را نسبت به گشتاور ورودی تعیین کرد که علامت آن نسبت جهت گشتاور را نشان میدهد.
برای برخی از بدنههای چرخ دنده، فقط نیروهایی روی آن وارد میشوند. مثال زیر از یک قطار دنده باید این را برجسته کند:
وجه داشته باشید که چگونه دنده میانی هیچ گشتاور خارجی بر روی آن وارد نمی کند.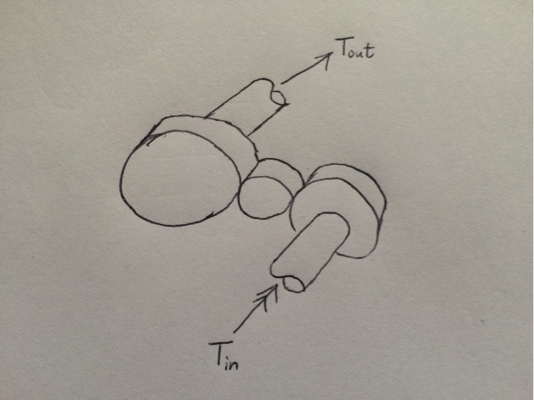
رویکرد قدرت مجازی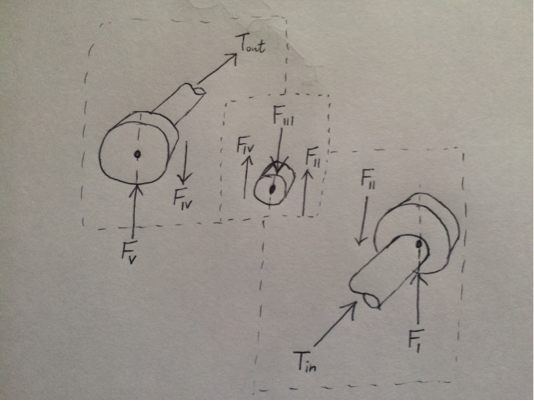
استفاده از روش دوم می تواند ساده تر باشد، به خصوص اگر سرعت های زاویه ای از قبل شناخته شده باشند. اول از همه، یک معادله جبری منفرد که سرعت های زاویه ای چرخ دنده ها را با گشتاورهای خارجی مرتبط می کند، باید به دست آید. برای قطارهای دنده ساده، این معادله فقط دو سرعت زاویه ای دارد و به شکل زیر است:
$\omega_{out} = G \omega_{in}$
که در آن G نسبت دنده ای است که باید تعیین شود. برای اکثر منظومه های سیاره ای، سه سرعت زاویه ای وجود دارد. مثالی که من از آن استفاده خواهم کرد قانون سرعت برای یک گیربکس ساده سیاره ای است:
$\omega_s = (1+R)\omega_c - R\omega_a$
که در آن زیرنویسهای "s"، "c" و "a" به چرخ دندههای خورشید، حامل و حلقوی اشاره دارند. R نسبت دندانه های چرخ دنده حلقوی به دنده خورشیدی است.
اکنون، ما به یک معادله موازنه توان نیاز داریم: برق در = خاموش کردن. اینجاست که قرارداد علامت به کار میآید: از آنجایی که جهتهای مرسوم گشتاور و سرعت زاویهای یکسان هستند، ضرب گشتاور خارجی که روی یک چرخ دنده اعمال میشود در سرعت زاویهای آن، مقدار توان را به شما میدهد. بنابراین، معادله تعادل قدرت مجموع تمام محصولات توان وارد شده برابر با صفر خواهد بود. یعنی به طور کلی:
$\sum_i T_i \omega_i = 0$
برای مثال من این است:
$T_c \omega_c + T_s \omega_s + T_a \omega_a=0$
برای یک قطار دنده ساده، جایگزینی معادله سرعت زاویهای با معادله تعادل قدرت بسیار ساده است، اما برای معادلات سرعت زاویهای با بیش از دو سرعت، بلافاصله اینطور نیست. برای حل چنین معادلاتی، باید یکی از سرعت های زاویه ای را روی صفر قرار دهید، مثل اینکه آن چرخ دنده را ثابت نگه دارید، به عنوان مثال:
ωa=0 را تنظیم کنید:
معادله: $\omega_s = (1+R)\omega_c$
تعادل قدرت:$T_c \omega_c + T_s \omega_s=0$
جایگزین Ang. Vel. معادله تعادل توان: $T_c/T_s = -(1+R)$
برای تنظیم سرعت دیگر روی صفر این کار را تکرار کنید.
به نظر می رسد که این تقلب با تنظیم اجباری سرعت های زاویه ای روی صفر است، اما همچنان معتبر است زیرا راه حل تعادل (یعنی مقادیر گشتاور خارجی) هرگز به سرعت های زاویه ای در ابتدا بستگی نداشت.
در نهایت، از هر روشی که استفاده شد، می توان یک بررسی سریع انجام داد تا ببیند آیا تمام گشتاورها تعادل جهانی را برآورده می کنند یا خیر. به لطف کنوانسیون نشانه، تعادل جهانی حاصل می شود اگر:$\sum_i T_i = 0$
برای یافتن توان خروجی، باید گشتاور حلقه های 5 و 6 را پیدا کنم. گشتاور و سرعت زاویه ای خورشید 1 مشخص است. همچنین من تمام سرعت های زاویه ای دیگر را دارم. من سعی می کنم روشی برای طراحی نمودار بدن آزاد این سیستم پیدا کنم.
اگر علامت مثبت در جهت عقربه های ساعت باشد، چگونه می توانم گشتاور T5 و T6 را به این نمودار بدنه آزاد اضافه کنم؟
در این پاسخ، من از قرارداد علامت استفاده میکنم که گشتاورها و سرعتهای زاویهای در صورتی مثبت هستند که جهت آنها به سمت راست باشد (چپ نیز جایگزینی به همان اندازه معتبر برای این پاسخ خواهد بود) با استفاده از قانون دست راست، یعنی در جهت عقربههای ساعت دیده شود. اگر از سمت چپ نگاه کنید هر چرخ دنده ای که در جهت مخالف بچرخد سرعت زاویه ای منفی خواهد داشت.
رویکرد تعادلی
یک روش برای تعیین گشتاور در هر چرخ دنده ترسیم نمودار بدنه آزاد یک چرخ دنده با تمام نیروها (دنده های مشبک، واکنش شفت) و گشتاورهای خارجی (گشتاور شفت) اعمال شده بر روی آن چرخ دنده است. سپس با نادیده گرفتن نیروهای اینرسی، از تعادل برای نوشتن عبارتی در رابطه با نیروهای ناشناخته دندان و گشتاورهای خارجی استفاده کنید. نمونه ای از این کار برای چرخ دنده ای که با علامت 1 مشخص شده است انجام می شود:
توجه داشته باشید که جهت نیروها کاملا دلخواه است،
با اعمال تعادل، و حذف نیروی شفت (فقط به نیروهای دنده و گشتاورهای خارجی علاقه مند است)، به دست می آوریم:
$F_{II} = T_{in}/r_1$
که در آن r1 شعاع گام چرخ دنده (تقریبا) یا فاصله از مرکز دنده تا خط فشار است (دقیق است، اما اگر در نهایت به گشتاورهای خارجی علاقه مند هستید، لازم نیست). با تکرار این کار برای همه دندهها، میتوان گشتاورهای خارجی را به یکدیگر مرتبط کرد و نسبتهای هر یک را نسبت به گشتاور ورودی تعیین کرد که علامت آن نسبت جهت گشتاور را نشان میدهد.
برای برخی از بدنههای چرخ دنده، فقط نیروهایی روی آن وارد میشوند. مثال زیر از یک قطار دنده باید این را برجسته کند:
وجه داشته باشید که چگونه دنده میانی هیچ گشتاور خارجی بر روی آن وارد نمی کند.
رویکرد قدرت مجازی
استفاده از روش دوم می تواند ساده تر باشد، به خصوص اگر سرعت های زاویه ای از قبل شناخته شده باشند. اول از همه، یک معادله جبری منفرد که سرعت های زاویه ای چرخ دنده ها را با گشتاورهای خارجی مرتبط می کند، باید به دست آید. برای قطارهای دنده ساده، این معادله فقط دو سرعت زاویه ای دارد و به شکل زیر است:
$\omega_{out} = G \omega_{in}$
که در آن G نسبت دنده ای است که باید تعیین شود. برای اکثر منظومه های سیاره ای، سه سرعت زاویه ای وجود دارد. مثالی که من از آن استفاده خواهم کرد قانون سرعت برای یک گیربکس ساده سیاره ای است:
$\omega_s = (1+R)\omega_c - R\omega_a$
که در آن زیرنویسهای "s"، "c" و "a" به چرخ دندههای خورشید، حامل و حلقوی اشاره دارند. R نسبت دندانه های چرخ دنده حلقوی به دنده خورشیدی است.
اکنون، ما به یک معادله موازنه توان نیاز داریم: برق در = خاموش کردن. اینجاست که قرارداد علامت به کار میآید: از آنجایی که جهتهای مرسوم گشتاور و سرعت زاویهای یکسان هستند، ضرب گشتاور خارجی که روی یک چرخ دنده اعمال میشود در سرعت زاویهای آن، مقدار توان را به شما میدهد. بنابراین، معادله تعادل قدرت مجموع تمام محصولات توان وارد شده برابر با صفر خواهد بود. یعنی به طور کلی:
$\sum_i T_i \omega_i = 0$
برای مثال من این است:
$T_c \omega_c + T_s \omega_s + T_a \omega_a=0$
برای یک قطار دنده ساده، جایگزینی معادله سرعت زاویهای با معادله تعادل قدرت بسیار ساده است، اما برای معادلات سرعت زاویهای با بیش از دو سرعت، بلافاصله اینطور نیست. برای حل چنین معادلاتی، باید یکی از سرعت های زاویه ای را روی صفر قرار دهید، مثل اینکه آن چرخ دنده را ثابت نگه دارید، به عنوان مثال:
ωa=0 را تنظیم کنید:
معادله: $\omega_s = (1+R)\omega_c$
تعادل قدرت:$T_c \omega_c + T_s \omega_s=0$
جایگزین Ang. Vel. معادله تعادل توان: $T_c/T_s = -(1+R)$
برای تنظیم سرعت دیگر روی صفر این کار را تکرار کنید.
به نظر می رسد که این تقلب با تنظیم اجباری سرعت های زاویه ای روی صفر است، اما همچنان معتبر است زیرا راه حل تعادل (یعنی مقادیر گشتاور خارجی) هرگز به سرعت های زاویه ای در ابتدا بستگی نداشت.
در نهایت، از هر روشی که استفاده شد، می توان یک بررسی سریع انجام داد تا ببیند آیا تمام گشتاورها تعادل جهانی را برآورده می کنند یا خیر. به لطف کنوانسیون نشانه، تعادل جهانی حاصل می شود اگر:$\sum_i T_i = 0$