سیستم قرقره. چرا باید علامت منفی بگذارم؟یک جرم 3.70 کیلوگرمی (بیایید آن را m1 بنامیم) از طریق یک طناب بدون جرم و غیر قابل امتداد به یک جرم 2.30 کیلوگرمی (بگذارید m2 باشد) وصل می شود که توسط یک قرقره مانند خم می شود.
من باید شتاب جرم (a) و کشش طناب (T) را محاسبه کنم. با در نظر گرفتن دو قاب مرجع مختلف برای هر جرم (همانطور که تصویر نشان می دهد)، معادلات زیر را برای نیروهایی که بر m1 در امتداد محور x و نیروهای وارد بر m2 در امتداد محور y آن وارد می شوند، کار کردم:
$\begin{cases}
T - m_1g\sin{30^{\circ}} = m_1a \\
T - m_2g = m_2a
\end{cases}$
برای رسیدن به این سیستم، مشاهده کردم که:
T باید در هر انتهای طناب یکسان باشد، زیرا غیر قابل امتداد است.
همان استدلال ثابت می کند که شتاب a برای هر دو جرم یکسان است.
T در هر دو چارچوب مرجع جهت مثبت دارد، در حالی که $-m_1g\sin{30^{\circ}}$ و $-m_2g$ همیشه یک جهت منفی دارند (از این رو علائم منفی).
فکر می کردم همه چیز را به درستی انجام داده ام، اما وقتی سعی کردم a و T را محاسبه کنم، نتایج من با نتایجی که در کتابم پیدا کردم مطابقت نداشت. پس از چند بار تلاش، متوجه شدم که سیستم فوق راه حل های مناسبی را ارائه می دهد، اگر فقط علامت m2a را اینگونه تغییر دهم$\begin{cases}
T - m_1g\sin{30^{\circ}} = m_1a \\
T - m_2g = \color{red}{-m_2a}
\end{cases}$
این ظاهراً با این واقعیت موافق است که از نظر فیزیکی، m2 در حالی که m1 را به سمت قرقره می کشد به سمت پایین می رود. سوال من این است: آیا قرار است از قبل این را بدانم؟ آیا برای حل مشکل به دانستن اینکه جرم-دیگری-کشیدن-چی-و-در کجا-است- نیاز دارم؟ همچنین باید اشاره کنم که چون m1 جرم بیشتری دارد، در ابتدا فکر میکردم که m1 همان چیزی است که به سمت پایین میلغزد در حالی که m2 را به سمت قرقره میبرد، بنابراین سعی کردم اولین سیستم را به جای m1a با$-m_1a$ بازنویسی کنم (بگذار m2a دست نخورده باقی بماند. ). همانطور که می توانید حدس بزنید، این کمکی نکرد.
من فقط می خواهم بفهمم چرا استدلال من ناقص است. من نشانههای T، $-m_1g\sin{30^{\circ}}$, $-m_2g$ را انتخاب کردم تا با فریمهای مرجعی که استفاده میکردم موافق باشند، در حالی که مجبور شدم m1a و m2a را همانطور که هستند رها کنم زیرا نمیدانستم سیستم چگونه تکامل مییابد. با این حال به نظر می رسد این دانش برای درک مکانیک این دو توده ضروری است. چه طور ممکنه؟در اولین معادله ای که نوشتید، اگر جسم در شیب بالاتر حرکت کند، a مثبت است. اگر این جسم در شیب بالاتر به سمت بالا حرکت کند، جسم آویزان شده روی طناب به سمت پایین می رود. این بدان معناست که یک a مثبت و در نتیجه، یک نیروی مثبت به سمت پایین اشاره می کند. بنابراین معادله شما نباید$T-m_2g=m_2a$ باشد بلکه$m_2g-T=m_2a$ باشد.
$T - m_1g\sin\theta = m_1a_1$
$T - m_2g = m_2a_2$
$a_1 = -a_2$
متغیرهای شتاب، شتاب هر جرم را در سیستم مختصات مستقل خود نشان می دهند، بنابراین آنها باید به این صورت شناسایی شوند. معادله سوم یک معادله محدودیت است که ارتباط بین دو سیستم مختصات را برقرار می کند. با انتخاب یک متغیر برای نشان دادن شتاب هر دو، آن اتصال را از دست می دهید.
سیستم های مختصات را جدا نگه دارید و محدودیت ها را به صراحت شناسایی کنید. مسائل سادهتر به راحتی به رویکرد انتخاب مجموعه خاصی از محورهای انتخاب شده برای ساده جلوه دادن حرکت میرسند. اما مشکلات پیچیده با چندین شی که به روشهای پیچیده به هم متصل شدهاند، دیوانه خواهید شد که سعی کنید آرایش «ساده» محورها را که حرکت را ساده میکند و در عین حال محدودیتها را رعایت میکند، کشف کنید. هر شی یک سیستم مختصات می گیرد. سیستم ها با معادلات محدودیت مرتبط هستند. این یک رویکرد سیستماتیک است که در دراز مدت سود سهام را پرداخت می کند. به نظر من ایجاد عادت خوبی است.
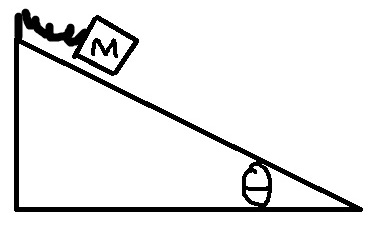
، دو جسم A و B به ترتیب 5 کیلوگرم و 20 کیلوگرم توسط یک ریسمان بدون جرم که از روی یک قرقره بدون اصطکاک در بالای صفحه شیبدار عبور می کند، به هم متصل می شوند. ضریب اصطکاک ساکن بین تمام سطوح mu_s = 0.4 است (الف) صفحه باید به چه زاویه ای متمایل شود تا لغزش شروع شود؟ (ب) کشش در طناب چقدر است، و مقدار نیروهای اصطکاک در این شیب بحرانی چقدر است؟ ج) در زاویه شیب 15 درجه، کشش طناب چقدر است؟ (د) در زاویه شیب 35∘، کشش طناب چقدر است؟
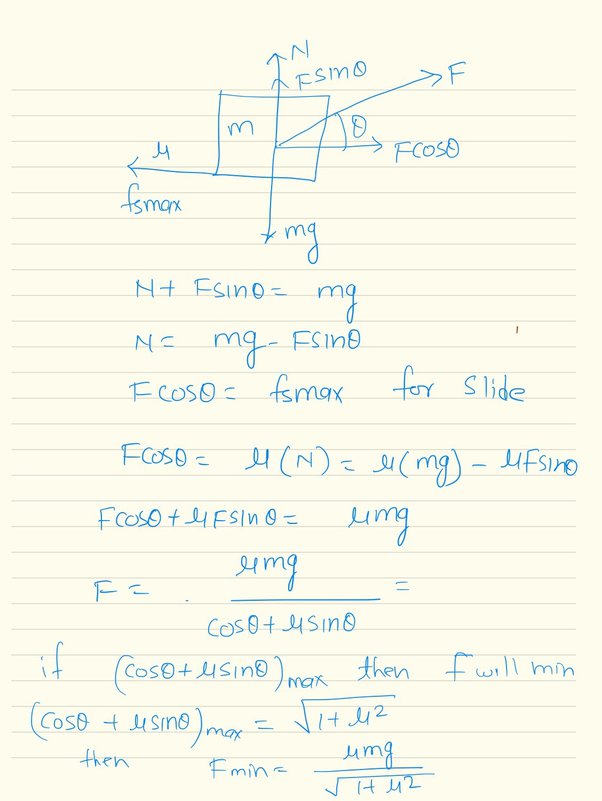
من توانستم (الف) و (ب) را با رسم نمودار جسم آزاد مطابق شکل حل کنم:

قانون دوم نیوتن که تمام شتاب ها را صفر می کند، بر روابط زیر دلالت دارد:
$N_A = m_A g \cos(\theta)$
$T = m_A g \sin(\theta) + f_2$
$N_B = (m_B + m_A) g \cos(\theta)$
$T + f_1 + f_2 = m_B g \sin(\theta)$
معادله دوم را می توان با معادله چهارم جایگزین کرد
$f_1 + 2f_2 = (m_B - m_A) g \sin(\theta) $
تنظیم نیروهای اصطکاک به حداکثر مقادیر خود $f_{1,{\rm max}} = \mu_s N_B = \mu_s (m_B + m_A) g \cos(\theta)$,$f_{2,{\rm max}} = \mu_s N_A = \mu_s m_A g \cos(\theta)$
اجازه می دهد تا این معادلات برای θ=43∘، $f_2 = 14.33$ حل شوند. ، f1=71.64 N و T=47.76 N.
با این حال، من در مورد قسمت های (c) و (d) که با زوایای زیر 43 سروکار دارند، کمی گیج شده ام.
من 5 مجهول دارم: کشش، دو نیروی عادی و دو نیروی اصطکاک، اما فقط چهار قید از قانون دوم نیوتن. به طور معادل، با اشاره به معادله (1)، نیروی خالص اعمالی که اصطکاک ایستا باید با آن مخالفت کند، ثابت است، بنابراین f1+2f2 مشخص است، اما هیچ محدودیت اضافی برای تعیین اینکه f1 چقدر مخالف و f2 چقدر مخالف است، وجود ندارد. به نظر می رسد درجه ای از آزادی در نحوه تعیین f1 و f2 وجود دارد، یعنی یک پارامتر آزاد.
تلاش من تاکنون این است که فرض کنم برای شیب های بسیار کوچک ممکن است انتظار داشته باشیم که اصطکاک بلوک ها را ثابت نگه دارد و بنابراین طناب سست شده و کشش T از معادلات حذف می شود. در این حالت نمودار جسم آزاد به شکل دیگری ترسیم می شود، زیرا بدون طناب، تمایل بلوک A به سمت پایین در بلوک B است:

حداکثر شیب تحت این شرایط توسط نیروهای متعادل کننده پیدا می شود:
mAgsin(θ)=f2≤μsmAgcos(θ)
⇒tan(θ)≤μ=0.4
⇒θ≤21.8∘
وقتی شیب بالای 21.8 ∘ افزایش یابد، من در مورد اینکه چه اتفاقی خواهد افتاد سردرگم هستم. بلوکها از شیب به پایین سر میخورند، اما طناب سفت میشود، و ناگهان تمایل سیستم به این خواهد بود که بلوک سنگینتر B از شیب تسریع کند، و بلوک سبکتر A به سمت بالا شتاب میگیرد (زیرا بلوک B میکشد. آن را از طریق طناب)، و در نتیجه نمودار بدن آزاد مانند شکل اصلی من است. من هنوز نمی دانم چگونه می توان کشش و دو نیروی اصطکاک را در این مورد محاسبه کرد.
چگونه کشش T و نیروهای اصطکاک f1 و f2 را برای زوایای شیب بین 21.8∘ و 43∘ تعیین کنم؟ برای این شیب ها، به نظر نمی رسد محدودیت های کافی برای تعیین هر کمیت وجود داشته باشد، به عنوان مثال معادله را ببینید. (1). آیا محدودیت دیگری وجود دارد که به آن فکر نکردهام، یا شاید نمودار بدن آزاد خود را اشتباه ترسیم کردهام؟
در زوایای کم وقتی اصطکاک می تواند بلوک ها را کنار هم نگه دارد، در این صورت هیچ کششی روی کابل وجود ندارد و بنابراین:
$f_2 = m_A g \sin \theta \\ f_2 = (m_A+m_B) g \sin \theta$,$f_2 = m_A g \sin \theta \\ f_2 = (m_A+m_B) g \sin \theta$
تنها زمانی که حرکت روی بلوک ها وجود داشته باشد تنش وجود دارد. در این صورت شما $\ddot{x} = \ddot{x}_A = -\ddot{x}_B$ دارید
$f_2 = \mu_S m_A g \cos \theta \\ f_2 = -\mu_S (m_A+m_B) g \cos \theta$,$f_2 = \mu_S m_A g \cos \theta \\ f_2 = -\mu_S (m_A+m_B) g \cos \theta$
(به تغییر علامت توجه کنید) و معادلات حرکت
$m_A (\ddot{x}) = g m_A \sin \theta -T -f_2 \\ m_B (-\ddot{x}) = g m_B \sin \theta -T - f_1 + f_2$,$m_A (\ddot{x}) = g m_A \sin \theta -T -f_2 \\ m_B (-\ddot{x}) = g m_B \sin \theta -T - f_1 + f_2$
که برایt وxحل می شود.
حالتی که دو بلوک به هم چسبیده و روی شیب لغزنده باشند به دلیل کابلی که آنها را به هم وصل می کند نمی تواند وجود داشته باشد.
نحوه استفاده از مکانیک لاگرانژی، نه مکانیک نیوتنی، برای یافتن کشش در یک سیستم از دو حلقه متصل به یک رشته بدون جرم بر روی یک قرقرهاین سوال از من میخواهد که نیروی کشش را در طناب اتصال دو حلقه، جرمهای m1 و m2 شعاع R1 و R2 که به طناب بدون جرم متصل شدهاند، پیدا کنم و یکی از طرفین یک قرقره بدون جرم را آویزان کنم.
در اینجا یک شکل است:
تلاش من برای راه حل:
هیچ محدودیتی داده نشده است، اما من $C = x_{1} + x_{2}$ را فرض می کنم که در آن C طول طناب است. همچنین با فرض اینکه حرکت به صورت 1 بعدی در طول رشته باشد.$T = \frac{1}{2}m_{1}\dot{x_{1}}^2 + \frac{1}{2}I_{1}\omega_{1}^{2} + \frac{1}{2}m_{2}\dot{x_{1}}^2 + \frac{1}{2}I_{2}\omega_{2}^2 \\ V = -m_{1}gx_{1}-m_{2}g(C-x_{1})$
و با استفاده از L=T−V، جایگزین$I = MR^2$و $\dot{x}=R\omega$میشود
$L = m_{1}\dot{x_{1}}^2 + m_{2}\dot{x_{1}}^2 + m_{1}gx_{1}+ m_{2}g(C-x_{1})$
و پس از اعمال معادله لاگرانژ
$2m_{1}\ddot{x_{1}} + 2m_{2}\ddot{x_{1}} + m_{1}g - m_{2}g = 0$
دادن
$\ddot{x_{1}} = \frac{(m_{2}- m_{1})g}{2m_{1}+2m_{2}}$
من سعی کردم از $ma = T - mg$ برای به دست آوردن راه حل داده شده استفاده کنم
$T = \frac{m_{1}m_{2}g}{m_{1} + m_{2}}$
اما این را گرفتم:
$\ddot{x_{1}} = \frac{(m_{2}- m_{1})g}{2m_{1}+2m_{2}} = \frac{T}{m_{1}}-g \\ \frac{T}{m_{1}} =\frac{m_{2}g- m{1}g+ 2m_{1}g+2m_{2}g}{2m_{1}+2m_{2}} = \frac{3m_{2}g+ m_{1}g}{2m_{1}+2m_{2}}$اوه.. هر کاری که کردی درسته جز این که شرایط اولیه رو رعایت نکردی.
بگیرید،$\dot{x_1}, \dot{x_2}=0$ یعنی $T = \frac{1}{2}I_{1}\omega_{1}^{2} + \frac{1}{2}I_{2}\omega_{2}^2$
اگرچه من این را تأیید نکردهام، اما یک عیبیابی سریع به من میگوید که شما فاکتورهای غیرضروری 2 را دارید.
Mass-spring system on an inclineسیستمجرم و فنر در یک شیب من برای امتحان هفته آینده مرور می کنم و این یکی از سوالاتی است که در آن گیر کرده ام. من سیستم جرم- فنر بالا را با ثابت فنر k در شیب بدون اصطکاک دارم. من می خواهم انرژی کل سیستم را در هر زمان t پیدا کنم.
من می دانم که کل انرژی سیستم حاصل جمع E=K+Ug+Us خواهد بود
اولین سوال من این است که در مورد نحوه برخورد با مشکل سردرگم هستم. اگر محورهایم را در امتداد سطح شیب دار بگیرم، مشکل یک بعدی می شود. ایده من این بود که سیستم مختصاتم را به این صورت تنظیم کنم تا بتوانم جابجایی جرم را در اطراف موقعیت تعادل آن روی سطح شیبدار توصیف کنم تا بتوانم K+Us را پیدا کنم و سپس به یک سیستم مختصات سنتی تر برگردم که در آن محورهایم را در امتداد قرار دهم. اضلاع عمود بر سطح شیب دار برای یافتن Ug. آیا این رویکرد کار می کند؟ اگر نه من باید چه کار کنم؟برای بدست آوردن معادله حرکت، استفاده از روش انرژی آسانتر است. فرض کنید L لاگرانژی L=T−V باشد که در آن T انرژی جنبشی و V انرژی پتانسیل است.$\begin{align*}
\,L & =T-V\\
& =\frac{1}{2}m\dot{x}^{2}-\left( -mgx\sin\theta+\frac{1}{2}kx^{2}\right)
\\
& =\frac{1}{2}m\dot{x}^{2}+mgx\sin\theta-\frac{1}{2}kx^{2}
\end{align*}$
از این رو، از آنجایی که هیچ نیروی خارجی فعال نیست،
$\begin{align*}
\frac{d}{dt}\left( \frac{\partial L}{\partial\dot{x}}\right) -\left(
\frac{\partial L}{\partial x}\right) & =0\\
\frac{d}{dt}\left( m\dot{x}\right) -\left( mg\sin\theta-kx\right) & =0\\
m\ddot{x}+kx & =mg\sin\theta
\end{align*}$
یک نقطه جرمی m بدون اصطکاک به سمت پایین شیب شیب تحت تأثیر گرانش حرکت می کند. با استفاده از معادله لاگرانژ نوع دوم معادلات حرکت را حل کرده و قید را تعیین کنید.
من برای امتحان آینده ام یاد می گیرم و به نوعی در این امتحان گیر کرده ام.
خوب، ابتدا سعی کردم این وضعیت را ترسیم کنم:
من هنوز با نمادها آشنا نیستم، اما حدس میزنم معادله لاگرانژ نوع دوم معادلات اویلر-لاگرانژ باشد، درست است؟
به هر حال، ابتدا سعی کردم L=T−V را دریافت کنم.$T=\frac{1}{2}m(\dot{x}^2+\dot{z}^2)$,$V=mgz$
، درست است؟
من آزادی را گرفتم و فاصله نقطه جرم تا مبدأ را به صورت r تعریف کردم. آیا من مجاز به انجام آن هستم؟
به هر حال، بنابراین این به من می رسد: x=rcosα و z=rsinα و مشتقات زمانی:$\dot{x}=\dot{r}\cos{\alpha}$و $\dot{z}=\dot{r}\sin{\alpha}$
به این معنی که: $L=\frac{1}{2}m(\dot{r}^2)-mgr\sin{\alpha}$، درست است؟
من نمی توانم به این راحتی با فرمالیسم لاگرانژ کنار بیایم، بنابراین احتمالاً اشتباهاتی انجام خواهم داد، اما آنچه تا اینجا به دست آوردم این است:
رویکرد این است:$\frac{d}{dt}(\frac{\partial L}{\partial \dot{r}})=\frac{\partial L}{\partial r}$، درست است؟
منجر به:
$m\ddot{r}=-mg\sin{\alpha}$
اکنون، من واقعاً مطمئن نیستم که حل معادلات حرکت واقعاً به چه معناست. آیا نوشتن $m\ddot{r}=mr-mg\sin{\alpha}$ همانطور که در بالا انجام دادم کافی است؟ یا من باید این معادله دیفرانسیل را حل کنم؟
اما حتی اگر چنین بود، فکر میکنم به نحوی میتوانم این کار را انجام دهم. فقط از آخرین باری که معادلات دیفرانسیل را حل کردم مدت زیادی می گذرد.
به هر حال، در مورد محدودیت. تا آنجا که من می توانم از ورودی ویکی برای اویلر-لاگرانژ بگویم راهی برای یافتن محدودیت با آن وجود ندارد. یا چیزی را از دست دادم و در واقع وجود دارد؟
امیدوارم کسی بتواند به من بگوید که آیا کاری که تاکنون انجام داده ام درست است یا خیر. من واقعاً در مورد این تمرینات مطمئن نیستم.
ویرایش: حل معادله دیفرانسیل به من کمک می کند
$\ddot{r}=-mg\sin{\alpha}\\
\dot{r}=-mg\sin{\alpha}t+C_1\\
r=-\frac{1}{2}mg\sin{\alpha}t^2+C_1t+C_2$؟ اما چگونه می توانم ثابت های C1 و C2 را پیدا کنم؟
اول از همه، من فکر می کنم که با "تعیین محدودیت" در واقع به معنای تعیین نیروهای محدودیت برای حرکت در نظر گرفته شده است. همچنین با "معادله لاگرانژ نوع دوم" به این معنی است که باید از روش لاگرانژ λ استفاده کنید.
اجازه دهید شماتیک های زیر را در نظر بگیریم (که تفاوت بسیار کمی با طراحی اولیه شما دارد). من معتقدم کار کردن با مختصات تعمیم یافته بسیار ساده تر و شاید زیباتر است تا با مختصات دکارتی معمول. بالاخره یکی از زیبایی های روش لاگرانژی در همین استعداد نهفته است.در نسخه من، r نشان دهنده فاصله بین زمین و ذره در امتداد صفحه/شیب شیبدار است. همچنین، اجازه دهید فرض کنیم که در حال حاضر، نمی دانیم که آیا ذره می تواند در سطح گوه فرو برود یا نه. از این رو وجود مختصات z وجود دارد. این دو مختصات همانهایی هستند که واقعا حرکت ذرات را توصیف می کنند. سپس، اگر مختصات z می تواند متفاوت باشد، ارتفاع ذرات بالای زمین$r\sin\theta - z\cos\theta$خواهد بود. با در نظر گرفتن این موضوع، انرژی بالقوه آن عبارت است از:
$\begin{equation}
V = mg(r\sin\theta - z\cos\theta)
\end{equation}$
اما برای اینکه ذره روی سطح بماند، مختصات z آن باید صفر باشد. این منجر به محدودیت هولونومیک می شود:
$\begin{equation}
f(z) = z = 0.
\end{equation}$
این محدودیت هولونومیک است، یک پتانسیل محدودیت $\lambda f(z)$ را فعال می کند که می تواند در انرژی پتانسیل اولیه ما گنجانده شود:
$\begin{equation}
V(z) = mg(r\sin\theta - z\cos\theta) + \lambda z.
\end{equation}$
انرژی جنبشی ذره عبارت است از:
$\begin{equation}
T(\dot r, \dot z) = \frac{1}{2}m(\dot r^2 + \dot z^2),
\end{equation}$
بنابراین حرکت لاگرانژی در مورد ما به این صورت خواهد بود:
$\begin{equation}
L(r,\dot r,z, \dot z) = \frac{1}{2}m(\dot r^2 + \dot z^2) - mg(r\sin\theta - z\cos\theta) - \lambda z.
\end{equation}$
این لاگرانژ به دو معادله حرکت منتهی می شود،
$\begin{equation}
\frac{d}{dt}\frac{\partial L}{\partial \dot r} - \frac{\partial L}{\partial r}= 0 \Leftrightarrow m\ddot r = mg\sin\theta
\end{equation}$
$\begin{equation}
\frac{d}{dt}\frac{\partial L}{\partial \dot r} - \frac{\partial L}{\partial r}= 0 \Leftrightarrow m\ddot z + mg\cos\theta = \lambda.
\end{equation}$
اما، قید اولیه f(z) ما حاکی از آن است که z¨=0. بنابراین ما به دو معادله حرکت زیر می رسیم:
$\begin{equation}
\ddot r = g\sin\theta
\end{equation}$
$\begin{equation}
\lambda = mg\cos\theta
\end{equation}$
در واقع، معادله دوم حرکت با نیروی محدودیت مطابقت دارد، جایی که λ نیروی نرمال اعمال شده توسط سطح گوه بر ذره است. معادله اول مربوط به حرکت لغزشی ذره است.
در پایان، ضریب لاگرانژ λ نیروی محدود کننده حرکت لغزشی است: نیرویی که برای نگه داشتن ذره روی سطح لازم است..hope I helped you understand the question. Roham Hesami, sixth semester of aerospace engineering

رهام حسامی ترم ششم مهندسی هوافضا

 ذره ای به جرم m1 از میله ای با جرم و طول ناچیز l آویزان است، که نقطه تکیه گاه آن از ذره دیگری به جرم m2 تشکیل شده است که به صورت افقی و با توجه به دو فنر با ثابت k هر یک حرکت می کند. معادلات حرکت این سیستم را پیدا کنید.اولین کاری که من انجام دادم تنظیم سیستم مرجع در گوشه سمت چپ بود. بعد گفتم که موقعیت جرم m2 x2 است. من همچنین فرض کردم که آونگ نسبت به محور عمودی y زاویه θ ایجاد می کند. بنابراین مختصات تعمیم یافته سیستم x2 و θ خواهد بود. بنابراین، مختصات m1 عبارتند از:
ذره ای به جرم m1 از میله ای با جرم و طول ناچیز l آویزان است، که نقطه تکیه گاه آن از ذره دیگری به جرم m2 تشکیل شده است که به صورت افقی و با توجه به دو فنر با ثابت k هر یک حرکت می کند. معادلات حرکت این سیستم را پیدا کنید.اولین کاری که من انجام دادم تنظیم سیستم مرجع در گوشه سمت چپ بود. بعد گفتم که موقعیت جرم m2 x2 است. من همچنین فرض کردم که آونگ نسبت به محور عمودی y زاویه θ ایجاد می کند. بنابراین مختصات تعمیم یافته سیستم x2 و θ خواهد بود. بنابراین، مختصات m1 عبارتند از: